В цифровых системах автоматического управления осуществляется квантование сигналов по времени и уровню (преобразование непрерывного в дискретные через равные промежутки времени, но при этом выделяется ближайший уровень непрерывного сигнала).
Квантование по времени делает всю систему управления дискретной (рисунок 1.14), а по уровню нелинейной. Разрядная сетка современных ЭВМ такова, что влиянием квантования по уровню можно пренебречь. Это делает всю систему линейной и позволяет использовать для ее расчета математический аппарат исследования импульсных систем.
Цифровой сигнал, отражающий преобразованный непрерывный сигнал в дискретный, представляет собой двоичное число - совокупность логических нулей и единиц. При исследовании цифровых систем автоматического управления этот реальный сигнал заменяют его математической абстракцией - решетчатой функцией.
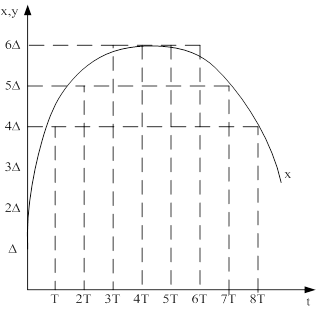
Рисунок 1.14 - График квантования сигнала по времени
Понятие решетчатой функции лежит в основе математического описания дискретных систем и позволяет осуществлять переход к дискретному аналогу дифференциальных уравнений - разностным уравнением (уравнения в конечных разностях). Эти уравнения, определяющие связь между значениями решетчатой функции с помощью конечных разностей, являются аналогами производных в дифференциальных уравнениях
Первая прямая разность:
![]() (1.2)
(1.2)
получается путем вычитания из последующего значения решетчатой функции (будущего) текущего значения.
Первая обратная разность:
![]() (1.3)
(1.3)
получается путем вычитания из текущего значения предыдущего.
Первая разность является аналогом первой производной непрерывной функции.
Для решения разностных уравнений широко применяется Z-преобразование, оно вытекает из дискретного преобразования Лапласа решетчатых функций.
Преобразование Лапласа
 . (1.4)
. (1.4)
Дискретное преобразование Лапласа для решетчатых функций
 . (1.5)
. (1.5)
Z-преобразование решетчатой функции
 , (1.6)
, (1.6)
где ![]() ,
,
n = 0, 1, 2, …. ![]() .
.
Таким образом, решетчатая исходная функция заменяется ее изображением (Z-преобразованием). Переход от оригинала к изображению позволяет заменить решение разностных уравнений - решением алгебраических.
В литературе приводятся примеры аппроксимации линейных регуляторов заменой операции дифференцирования на первую разность. При этом имеется возможность использовать накопленный опыт работы с аналоговыми регуляторами и применять известные правила настройки регуляторов.
Для определения структуры цифрового КУ аппроксимируем передаточную функцию аналогового регулятора, настроенного на оптимальную работу. Исследуем влияние изменения коэффициентов регулятора, на качество управления и характер переходного процесса, и определим значения коэффициентов, при которых обеспечиваются наилучшие динамические характеристики электропривода.
Так же ставится задача исследования устойчивости электропривода с разработанным регулятором.
Советуем почитать:
Передатчик импульсный СВЧ диапазона Управление полетом современных летательных аппаратов (ЛА) - технически сложный процесс, который требует большого количества стабильной и достоверной информации о параметрах полета, режим ...
Ультразвуковые сканеры Ультразвуковые аппараты для интроскопии в литературе встречаются под разными названиями: эхоскопы, эхотомоскопы, УЗ сканеры. Первое и второе названия подчеркивают их физическую сущность ...
Разработка микропроцессорной системы Автомобильные часы-термометр-вольтметр на базе микроконтроллера Современную микроэлектронику трудно представить без такой важной составляющей, как микроконтроллеры. Микроконтроллеры незаметно завоевали весь мир. Микроконтроллерные технологии очень эф ...