Для расчета линейного регулятора, используем модель электропривода, приведенную на рисунке 2.1 Так как в электроприводе с фазовой синхронизацией главной целью является отработка фазового рассогласования по углу поворота вала, то в качестве выходной координаты удобно принять ошибку по углу Δα. В качестве оптимального режима, примем критический переходный процесс
Преобразуем структурную схему (рисунок 1.12) к виду, показанному на рисунке 2.1.
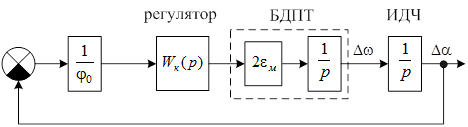
Рисунок 2.1 - Преобразованная структурная схема электропривода с фазовой синхронизацией
В в качестве регулятора предлагается использовать пропорционально-дифференциальное (форсирующее) звено с передаточной функцией:
![]() . (2.1)
. (2.1)
Передаточная функция замкнутой системы с аналоговым регулятором:
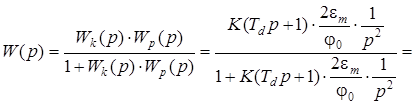
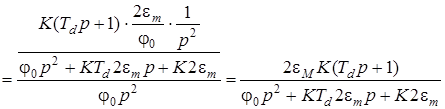 . (2.2)
. (2.2)
Обозначим
 , (2.3)
, (2.3)
где ![]() - добротность электропривода по ускорению
- добротность электропривода по ускорению
Перепишем (2.2) с учетом выражения (2.3):
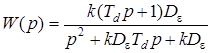 . (2.4)
. (2.4)
Переходный процесс будет иметь критический характер, если корни характеристического уравнения
![]() (2.5)
(2.5)
будут равными отрицательными.
Корни характеристического уравнения (2.5):
![]() ; (2.6)
; (2.6)
являются равными отрицательными, если дискриминант равен нулю:
![]() . (2.7)
. (2.7)
Равенство (2.7) выполняется при
 . (2.8)
. (2.8)
Проведем анализ работы электропривода, с линейным регулятором используя модель (рисунок 2.1), реализованную в программном пакете Matlab. Структурная схема модели приведена на рисунке 2.2.
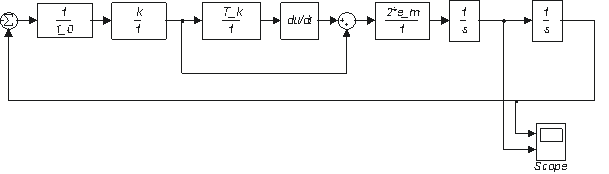
Рисунок 2.2 - Структурная схема модели электропривода с аналоговым регулятором, реализованная в MatLab
Здесь начальные условия по угловой ошибке ![]() ; по частоте вращения
; по частоте вращения ![]() ; где
; где ![]() - максимальное перерегулирование по угловой скорости в пропорциональном режиме работы электропривода Фазовый портрет работы электропривода с аналоговым регулятором представлен на рисунке 2.3, диаграммы изменения ошибок по углу
- максимальное перерегулирование по угловой скорости в пропорциональном режиме работы электропривода Фазовый портрет работы электропривода с аналоговым регулятором представлен на рисунке 2.3, диаграммы изменения ошибок по углу ![]() и скорости
и скорости ![]() приведены на рисунке 2.4.
приведены на рисунке 2.4.
При моделировании использовались следующие исходные данные: ![]() (рад/с2) - максимальное угловое ускорение электродвигателя;
(рад/с2) - максимальное угловое ускорение электродвигателя; ![]() (рад) - угловое расстояние между метками импульсного датчика частоты;
(рад) - угловое расстояние между метками импульсного датчика частоты;
Z = 4800 - количество меток импульсного датчика частоты;
k = 1 - коэффициент усиления корректирующего устройства.
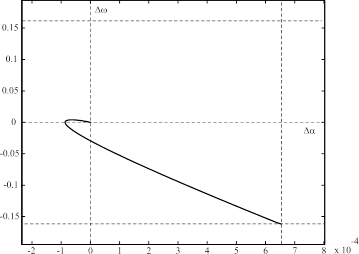
Рисунок 2.3 - Фазовый портрет работы электропривода с аналоговым ПД-регулятором.
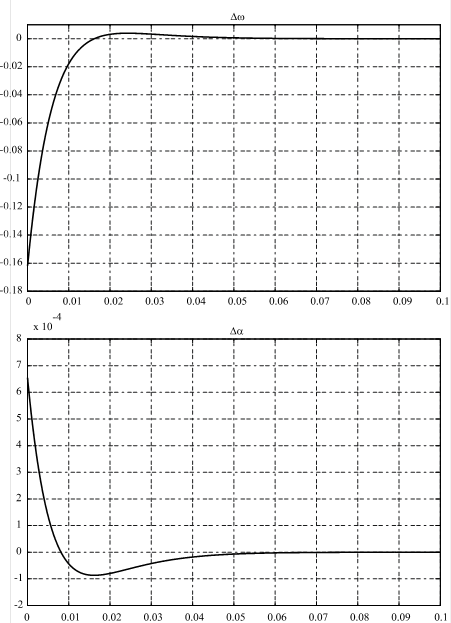
Рисунок 2.4 - Графики изменения ошибок по углу и скорости электропривода с аналоговым регулятором.
Выберем в качестве критерия оценки качества работы электропривода, время, в течение которого, ошибка по углу входит в интервал величиной 1% от φ0. Это утверждение справедливо в силу того, что угловая ошибка в пропорциональном режиме работы электропривода, не может превышать величины ![]() . Из графика (рисунок 2.4) - время регулирования
. Из графика (рисунок 2.4) - время регулирования ![]() .
.
Определение надежности устройства РЭА Полупроводниковая электроника – прогрессирующая область науки и техники. Уже в первом десятилетии с момента изобретение транзисторов полупроводниковые приборы нашли широкое применение в ...
Расчет приемника наземной обзорной РЛС Основной особенностью РЭО летательных аппаратов является то, что оно работает в системе УВД, будучи связано с ней функционально или электрически. Радиотехнические средства обеспечени ...
Разработка микропроцессорной системы Автомобильные часы-термометр-вольтметр на базе микроконтроллера Современную микроэлектронику трудно представить без такой важной составляющей, как микроконтроллеры. Микроконтроллеры незаметно завоевали весь мир. Микроконтроллерные технологии очень эф ...