В ТЗ на проектирование указаны допустимые статическая ![]() и динамическая
и динамическая ![]()
ошибки
привода.
Статическая ошибка системы оценивается в типовом режиме: при постоянных значениях задающего и возмущающего воздействий. В п. 2.1 уже использовалась допустимая ![]() при выборе элементов измерителя рассогласований. На измеритель рассогласования была выделена третья часть
при выборе элементов измерителя рассогласований. На измеритель рассогласования была выделена третья часть ![]() . Оставшиеся две трети
. Оставшиеся две трети ![]() составляют: статическая ошибка элементов прямого канала системы (усилителя, двигателя, редуктора), ошибки системы по задающему и возмущающему воздействиям. В соответствии с вышесказанным, уравнение статической ошибки системы:
составляют: статическая ошибка элементов прямого канала системы (усилителя, двигателя, редуктора), ошибки системы по задающему и возмущающему воздействиям. В соответствии с вышесказанным, уравнение статической ошибки системы:
![]() , (2.27)
, (2.27)
где ![]() – ошибка элементов прямого канала,
– ошибка элементов прямого канала,
![]() – ошибка по задающему воздействию,
– ошибка по задающему воздействию,
![]() – ошибка по возмущению.
– ошибка по возмущению.
Таким образом, статическая погрешность элементов прямого канала ![]() .
.
Статическая погрешность по задающему значению ![]() , так как система является астатической по задающему воздействию.
, так как система является астатической по задающему воздействию.
Статическая погрешность привода по возмущающему воздействию ![]() –
– ![]() .
.
Определим допустимую статическую погрешность привода по возмущающему воздействию:
![]() .
.
Для определения ошибки скорректированной системы по возмущающему воздействию воспользуемся методом коэффициентов ошибок, описываемым формулой :
![]() , (2.28)
, (2.28)
где ![]() – передаточная функция замкнутой системы по ошибке относительно возмущения
– передаточная функция замкнутой системы по ошибке относительно возмущения ![]() ,
,
![]() – статический момент нагрузки приведенного к валу двигателя, являющийся возмущающим воздействием (
– статический момент нагрузки приведенного к валу двигателя, являющийся возмущающим воздействием (![]() ).
).
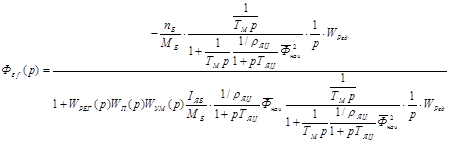
Найдем передаточную функцию ![]() по структурной схеме (рис. 2.5) скорректированной системы управляемого привода.
по структурной схеме (рис. 2.5) скорректированной системы управляемого привода.
 .
.
![]() .
.
 .
.
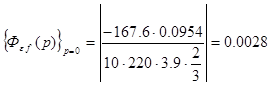
![]() .
.
Таким образом, получили, что ![]() , значит, рассчитанный коэффициент передачи корректирующего устройства удовлетворяет требованиям к статической точности системы.
, значит, рассчитанный коэффициент передачи корректирующего устройства удовлетворяет требованиям к статической точности системы.
Далее проведем оценку динамической точности системы. Допустимая динамическая ошибка системы ![]() указывает заданную точность воспроизведения программного входного сигнала.
указывает заданную точность воспроизведения программного входного сигнала.
Амплитуда ошибки определяется по формуле:
![]() , (2.29)
, (2.29)
где ![]() – ордината контрольной точки запретной области, найденная в пункте 2.3.
– ордината контрольной точки запретной области, найденная в пункте 2.3.
Найдем значение динамической ошибки при минимальной и максимальной нагрузках на управляемый привод:
![]() ,
,
![]() .
.
Таким образом, рассчитанная динамическая ошибка системы ![]() меньше, чем динамическая ошибка системы, заданная в ТЗ
меньше, чем динамическая ошибка системы, заданная в ТЗ ![]() . Значит, скорректированная система удовлетворяет требованиям ТЗ по динамической точности при максимальной массе нагрузки.
. Значит, скорректированная система удовлетворяет требованиям ТЗ по динамической точности при максимальной массе нагрузки.
Разработка делителя мощности на микрополосковой линии В настоящее время область применения радиоэлектронных средств расширяется, комплексы радиосистем становятся все более сложными, это полностью относится и к радиотехнике СВЧ диапазона. В ...
Идентификация технологических объектов управления Объективные закономерности, присущие процессам переработки информации, обусловливают аналогию функциональных структур человека-оператора и управляющего устройства любого типа. Эта аналог ...
Содержание кабеля под воздушным давлением Все магистральные и межстанционные кабели емкостью от 100 пар и более устанавливают под постоянное избыточное воздушное давление. Это делают во избежание проникновения влаги и дл ...