На рис. 3.7 представлена цифровая модель скорректированной системы при отработке выбранной траектории движения при минимальной массе нагрузки, построенная в программной среде MATLAB.
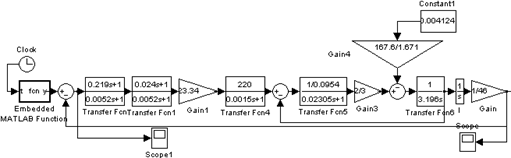
Рис. 3.7. Цифровая модель скорректированной системы при отработке программной траектории при минимальной нагрузке на управляемый привод
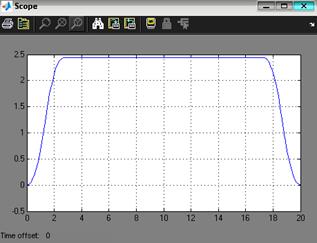
Рис. 3.8. Реакция выхода системы при отработке программной траектории движения при минимальной массе нагрузки на управляемый привод
Динамическую ошибку системы определим по графику ошибки, представленном на рисунке 3.9.
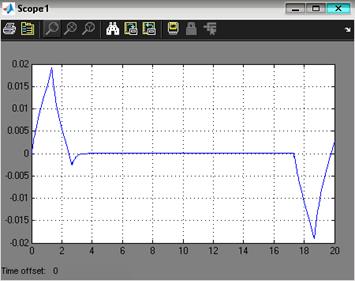
Рис. 3.9. Ошибка системы при отработке программной траектории движения при минимальной массе нагрузки на управляемый привод
![]()
Реальное значение ошибки: ![]()
Требование ТЗ к динамической точности: ![]() .
.
Цифровая модель скорректированной системы при отработке программной траектории движения при максимальной массе нагрузки на управляемый привод
На рис. 3.10 представлена цифровая модель скорректированной системы при отработке выбранной траектории движения при максимальной массе нагрузки, построенная в программном пакете MATLAB.
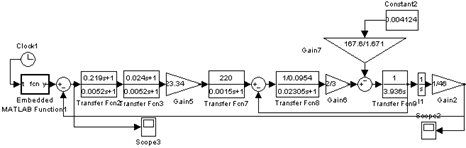
Рис. 3.10. Цифровая модель скорректированной системы при отработке программной траектории при максимальной нагрузке на управляемый привод
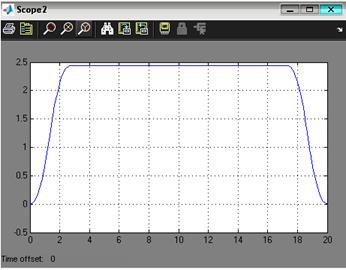
Рис. 3.11. Реакция выхода системы при отработке программной траектории движения при минимальной массе нагрузки на управляемый привод
Динамическую ошибку системы определим по графику ошибки, представленном на рисунке 3.12.
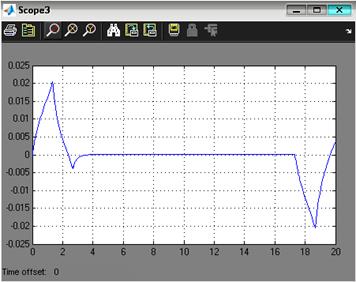
Рис. 3.12. Ошибка системы при отработке программной траектории движения при минимальной массе нагрузки на управляемый привод
![]()
Реальное значение ошибки: ![]()
Требование ТЗ к динамической точности: ![]() .
.
Цифровая модель спроектированного электропривода для максимальной и минимальной массы нагрузки удовлетворяет ограничению на динамическую ошибку, представленному в ТЗ.
В курсовом проекте был разработан электропривод, предназначенный для программного управления линейным перемещением механизма подъёма промышленного робота-манипулятора.
При выполнении первого этапа проекта рассматривались две программные траектории перемещения нагрузки, предложенные в техническом задании, для которых были рассчитаны параметры (скорость, ускорение). Для каждой из траекторий были определены нагрузки, действующие на привод, выбран двигатель и редуктор, проведена проверка двигателя и редуктора на нагрев. Далее ввиду функциональных особенностей привода была выбрана оптимальная траектория.
На втором этапе проектирования выбраны информационные элементы (потенциометры) по заданной статической точности, проведен синтез регулятора.
На следующем этапе был проведено моделирование цифровой модели спроектированного электропривода с помощью программного пакета MATLAB. Полученная цифровая модель отвечала всем требованиям технического задания по точности и качеству. Соответствие характеристик рассчитанной системы требованиям технического задания приведено в таблице 4.
Таблица 4. Сравнение результатов, полученных при выполнении проекта
| Основные требования | По требованиям ТЗ | Скорректированная система | |
|
|
|
| 14.81 |
|
| 11.04 | ||
|
|
|
| 0.87 |
|
| 0.95 | ||
|
|
|
| 0.001 |
|
| 0.001 | ||
|
|
|
| 0.78 |
|
| 0.83 | ||
Проект системы радиодоступа в п. Омчак Магаданской области Традиционные проводные сети составляют основу телекоммуникационной инфраструктуры и еще долго сохранят значимость. Однако их развитие происходит медленно и не всегда успевает за спросом. ...
Содержание кабеля под воздушным давлением Все магистральные и межстанционные кабели емкостью от 100 пар и более устанавливают под постоянное избыточное воздушное давление. Это делают во избежание проникновения влаги и дл ...
Расчёт спиральной антенны круговой поляризации спиральная антенна круговая поляризация Антенна является необходимой частью любой радиотехнической системы. Антенны классифицируются по многим признакам и параметрам. По направленнос ...