В данном курсовом проекте разрабатывается привод подач токарного станка. Для перемещения по координате предусмотрен свой привод. Поэтому разработку производим для одного контура управления. Применение ЦСУ позволяет значительно повысить точность и качество обработки, упростить кинематику привода подач, избежать применения многоступенчатого редуктора, повысить технологические возможности станка. Кинематическая схема привода подач изображена на рисунке 1.1. Вращательное движение от электродвигателя через одноступенчатый редуктор Р передается на ходовой винт. Через передачу винт-гайка вращательное движение преобразуется в поступательное движение суппорта С. На ходовом винте установлен кодовый датчик (КОД) положения, позволяющий контролировать также частоту вращения винта путем цифрового дифференцирования.
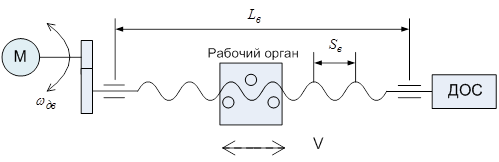
Рисунок 1.1 - Кинематическая схема привода
Такая система обеспечивает глубокое регулирование скорости и высокоточный контроль перемещения стола по координате.
Станок токарный предназначен выполнять токарную обработку деталей и нарезку резьбы на телах вращения (валы, диски и т.д.) из стали.
По согласованию с изготовителем станок оснащается суппортом с одним плоским резцедержателем, накладным отрезным резцедержателем или четырёх позиционной головкой с вертикальной осью вращения.
Область применения станка – различные отрасли промышленности.
Связав технические характеристики с параметрами, указанными в задании, произведём расчет и выбор электродвигателя привода подачи суппорта станка.
Мощность, затрачиваемая на рабочей подаче с учетом всех сил:
![]() , (1.1)
, (1.1)
где VП=17 м/мин – максимальная скорость подачи;
![]() , (1.2)
, (1.2)
где FП =7 кН – сила подачи, FТ.Н.![]() – сила трения в направляющих;
– сила трения в направляющих;
![]() (1.3)
(1.3)
![]() (1.4)
(1.4)
![]() (1.5)
(1.5)
Тогда требуемая мощность определится:
 , (1.6)
, (1.6)
где h-К.П.Д. двигателя, h=0.9;
Исходя из расчётов необходимой мощности, предварительно выбираем электродвигатель типа ПБВ-132L. Характеристики ЭД типа ПБВ-132L представлены в таблице 1.1.
Таблица 1.1 - Характеристики ЭД типа ПБВ-112
| Номинальный момент, Н×м | 47,7 |
| Номинальная скорость, об/мин | 600 |
| Номинальная мощность, кВт | 3,0 |
| Номинальное напряжение, В | 70 |
| Номинальный ток, А | 50 |
| Максимальный момент, Н×м | 470 |
| Максимальная скорость, об/мин | 2000 |
| Момент инерции якоря, кг-м2* |
|
| Максимальное ускорение, с-2 | 1970 |
| Электромеханическая постоянная, мс | 12,3 |
| Электромагнитная пост., мс | 7,85 |
Структурные схемы цифровых радиопередающих устройств Радиопередающие устройства (РПдУ) применяются в сферах телекоммуникации, телевизионного и радиовещания, радиолокации, радионавигации. Стремительное развитие микроэлектроники, аналогов ...
Разработка микропроцессорной системы Автомобильные часы-термометр-вольтметр на базе микроконтроллера Современную микроэлектронику трудно представить без такой важной составляющей, как микроконтроллеры. Микроконтроллеры незаметно завоевали весь мир. Микроконтроллерные технологии очень эф ...
Усилительный каскад с общим эмиттером Полупроводниковые электронные устройства делятся на два больших класса: аналоговые и цифровые (дискретные). В основе классификации лежит возможность изменения в устройстве электрического ...