Представим систему дифференциальных уравнений в векторно-матричной форме.
Z′ (t) = A*Z (t) +B*U (t), (1.3)
где матрица А - динамическая матрица объекта управления, которая характеризует динамику объекта;
Z (t) - вектор фазового состояния;
В - матрица управляющих (возмущающих) объекта, которая характеризует степень возмущения (управления);
U (t) - вектор возмущения.
Для нахождения динамической матрицы, вектора состояния, матрицы управляющих объекта, вектора возмущений введем некоторую переменную Z (t), и воспользуемся преобразованием Коши для системы дифференциальных уравнений (1.1):
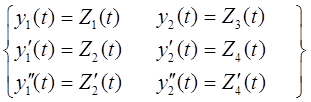 , (1.4)
, (1.4)
тогда система (1.2) примет вид:
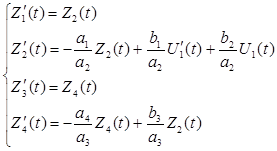 . (1.5)
. (1.5)
Перейдем от системы уравнений (1.5) к векторно-матричной форме:
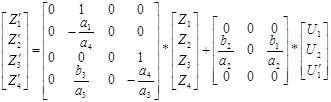 . (1.6)
. (1.6)
Таким образом, выражение (1.3) описывает поведение объекта управления в переменных в параметрическом и фазовом пространствах.
Советуем почитать:
Проектирование управляемого привода в электромеханических системах Управляемый электропривод получил широкое применение во всех сферах жизни и деятельности общества от промышленного производства до бытовой техники. Широта применения определяет исключит ...
Изучение характеристик ключевых схем на дополняющих МОП-транзисторах (КМОП) Изучить характеристики ключевых схем на дополняющих МОП-транзисторах (КМОП) и базовых схем логических элементов КМОП, используя возможности программы MC8DEMO. Изучить содержание процессо ...
Разработка конструкции и технологии изготовления измерителя емкости В повседневной работе радиолюбителей часто приходиться определять данные радиоэлементов. Если измерить сопротивление резистора не составляет особого труда – можно воспользоваться обычны ...