Здесь мы рассмотрим устройство и принцип работы однофотонного ЭКТ на основе выпускаемого фирмой "Монокристалл – Оризон" (Украина) эмиссионного томографа ГКС-301Т "Тамара" (ГКС означает – гамма-камера сцинтилляционная, Т – с режимом томографирования). Обобщенная структурная схема этого устройства приведена на рис.5. Количество функциональных узлов в ней невелико, однако каждый из них достаточно сложен. Блок детектора в основном соответствует структурной схеме, приведенной на рис.2. Существенно новым в нем является автоматическое управление режимами ФЭУ, с помощью которого добиваются более высокой однородности детектора по площади. Кроме того, для энергетической коррекции координатных сигналов X = X+ – X– и Y = Y+– Y– их делят не на энергетические сигналы Z, а на суммы X+ + X– и Y++ Y– . Это позволяет уменьшить погрешность, обусловленную дрейфом и разбросом параметров координатных резисторных матриц.
Блок обработки и управления служит, в основном для коррекции линейности и однородности. В него также входит система автоматической накопления и стабилизации (САНС), которая управляет режимами ФЭУ. Накопление заключается в подсчете числа импульсов, принимаемых отдельными ФЭУ, т.е. формировании их спектров. Фотопики этих спектров затем сравниваются с эталонными (реперными), и в случае их отклонения производится автоматическое изменение режима ФЭУ. Этот блок управляет также разверткой координат при сканировании тела.
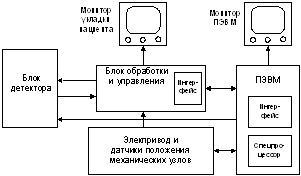
Рисунок 5. Структурная схема эмиссионного томографа.
Блок приводов осуществляет перемещение различных механических узлов томографа: угловое перемещение и орбитальное вращение детекторной головки, изменение высоты ее подъема, линейное перемещение гамма-камеры или ложа пациента при линейном сканировании, изменение его высоты. К блоку приводов отнесены и датчики линейных и угловых перемещений.
Перед проведением исследований на томографе с помощью специального монитора укладки находят очаг γ-излучения, соответствующий предполагаемой области обследования. Это позволяет уменьшить вероятность ошибок и промахов. На экран монитора укладки также выводится некоторая служебная информация (координаты детектора, ложа и др.). Для управления комплексом, как правило, достаточно ПЭВМ среднего класса с совмещенным сопроцессором, который выполняет вычислительные функции. Координатные и энергетический сигналы могут поступать в ЭВМ в аналоговой или цифровой форме. В первом случае интерфейс ЭВМ будет более сложным: он содержит три АЦП, во втором – требуется высокое быстродействие канала связи.
На рис.6 показаны общий вид (а) и некоторые узлы (б, в) эмиссионного томографа. Детекторная головка 1 (вместе с коллиматором) закреплена на коромысле 2, на противоположном конце которого находится противовес 3, и может вращаться относительно коромысла. Коромысло закреплено на кольцевом штативе 4 и может подниматься и опускаться. Для этого служит раздвижной шток 5 (актуатор) с установленным на нем электродвигателем. Кроме того, коромысло вместе с детектором может вращаться в кольцевом штативе в режиме томографирования. В отсеке 6 находятся блок обработки и управления информацией, а также электронная система управления приводами и сами приводы некоторых узлов.
Пациент располагается на специальном столе 7 (стол пациента) с подвижным ложем. Для продольного сканирования тела могут использоваться два варианта перемещения. В одном из них томограф движется по рельсам вдоль неподвижного стола, а во втором – томограф неподвижен, а перемещается ложе стола. В современных ЭКТ применяется второй вариант сканирования. Монитор укладки 8 размещается в верхней части томографа. На томографе имеется пульт местного управления, с помощью которого по монитору укладки производят выбор начального места обследования.
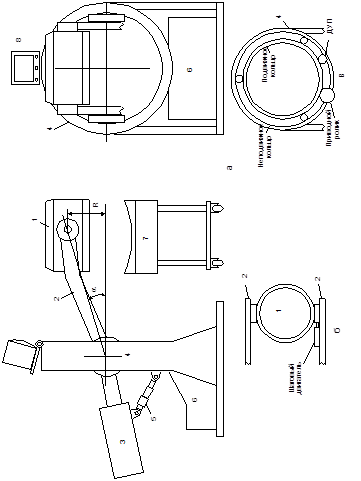
На рис.6, б, в показаны узлы привода углового перемещения детекторной головки и коромысла. В статическом режиме и режиме сканирования детекторная головка с высокой точностью должна устанавливаться параллельно горизонтальной плоскости. Эта установка производится посредством шагового двигателя через многоступенчатый редуктор и соответствующего датчика углового положения (ДУП). Круговое вращение осуществляется с помощью системы вложенных колец – подвижного и неподвижного. К подвижному кольцу крепится правый шарнир актуатора Высота подъема, а при томографировании – орбитальный радиус R, вычисляется по формуле R = L×sinα , где L – расстояние между осями вращения коромысла и детектора. Угол α измеряется соответствующим датчиком углового положения. Перейти на страницу: 1 2
Советуем почитать:
Устройство и работа отдельных узлов рентгеновского компьютерного томографа Обобщенная структурная схема рентгеновского компьютерного томографа приведена на рис.1. Несмотря на существенные различия в принципах сканирования, конструкциях механических и электронных уз ...
Проектирование управляемого привода в электромеханических системах Управляемый электропривод получил широкое применение во всех сферах жизни и деятельности общества от промышленного производства до бытовой техники. Широта применения определяет исключит ...
Расчёт спиральной антенны круговой поляризации спиральная антенна круговая поляризация Антенна является необходимой частью любой радиотехнической системы. Антенны классифицируются по многим признакам и параметрам. По направленнос ...