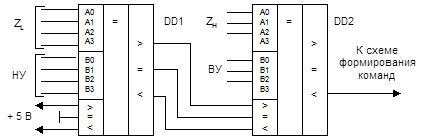
На компаратор DD1 подаются младшие разряды Z-сигнала ZL и код нижнего уровня НУ, а на DD2 – старшие разряды Z-сигнала и код верхнего уровня ВУ. Если Z-сигнал попадает в окно, т. е. он больше НУ и меньше ВУ, то вначале компаратор DD1 выдаст сигнал на выходе « > », а затем DD2 продолжит сравнение и выдаст сигнал на выходе « < », который поступит в схему формирования управляющих команд.
 |
|
Если же Z-сигнал не попадает в окно (Z < НУ или Z > ВУ), то сигнал на выходе «<» DD2 не появляется. При использовании в качестве разрядов ВУ разрядов Z11, Z10 и Z9, а для формирования НУ – разрядов Z8, Z7, Z6, Z5 энергетического сигнала диапазон изменения ВУ будет лежать в пределах 512 – 2048, а диапазон НУ – в пределах 32 – 256.
Достаточно длительный опыт эксплуатации ЭКТ показал, что настроенная детекторная система долгое время сохраняет свои основные параметры в допустимом диапазоне. Поэтому к «услугам» САНС приходится прибегать сравнительно редко (не более двух раз в год). По этим причинам обычно не используется и режим стабилизации, который занимает довольно много рабочего времени.
Рассмотрим теперь рабочий режим, когда в ЭВМ передаются сигналы для формирования изображения. Для этого используются первичные координатные и энергетический сигналы. Однако, прежде, чем попасть в ЭВМ, они проходят довольно сложный путь дополнительной коррекции. Как уже говорилось, эти поправки зависят от координат сцинтилляций и заранее известны. Поскольку поправки нужно вводить в реальном масштабе времени, т. е. немедленно, то эти преобразования выполняют аппаратными средствами (с такой проблемой мы встречались еще при изучении УЗ сканеров). Следовательно, поправочные коэффициенты, с помощью которых вычисляются сами поправки, должны храниться в ПЗУ, а первичные аналоговые сигналы – преобразовываться в цифровую форму.
Дальнейший путь преобразований зависит от типа и характеристик доступной для разработчика и производства элементной базы. В связи с этим надо еще раз заметить, что требуемая скорость передачи сигналов в ЭВМ весьма высока – она достигает 200000 импульсов (байт или слов при цифровой связи) за секунду. Так как эти сигналы приходится передавать на достаточно большое расстояние (несколько метров), то возникают определенные технические трудности при их передаче в цифровой форме. В модели ГКС-301Т они передаются в аналоговом виде, а в ЭВМ преобразуются в цифровую форму с помощью встроенных АЦП. Как видим, первичные аналоговые сигналы проходят многоступенчатое преобразование: сначала в цифровую форму (для вычисления поправок, а также для использования в процедуре накопления спектров), затем – снова в аналоговую – для получения скорректированных сигналов и посылки их в ЭВМ, где еще они раз преобразуются в цифровые.
Коррекция линейных искажений заключается в изменении первичных значений координат X, Y на некоторую величину (поправку) DX и DY, которые являются функциями этих же координат. Для этого используют различные аппроксимации, простейшей из которых является билинейная. При такой аппроксимации поправки вычисляются согласно алгоритму
DXi = K1i + K2iXi + K3iYi + K4iXiYi , (2)
DYi = K5i + K6iXi + K7iYi + K8iXiYi ,
где K1i, K2i и т. д. – коэффициенты, которые рассчитывают при настройке при помощи дырчатого фантома; Xi , Yi – младшие разряды координат. Перейти на страницу: 1 2 3 4 5
Советуем почитать:
Устройства регулировки и перемножения сигналов В усилителях необходимо регулировать усиление и форму АЧХ. Основные требования к регуляторам: 1) Минимум помех, вносимых регулятором (фон переменного тока, шумы трески и т.д.). ...
Цифровые синтезаторы частоты Радиопередающие устройства (РПдУ) применяются в сферах телекоммуникации, телевизионного и радиовещания, радиолокации, радионавигации. Стремительное развитие микроэлектрон ...
Проектирование управляемого привода в электромеханических системах Управляемый электропривод получил широкое применение во всех сферах жизни и деятельности общества от промышленного производства до бытовой техники. Широта применения определяет исключит ...