Несмотря на относительную простоту механического датчика его блок управления достаточно сложен. Это объясняется прежде всего тем, что датчик является инерционной системой и управляющее воздействие на двигатель не может однозначно определять угловое положение пьезопреобразователя. Движение вращающихся частей датчика описывается дифференциальным уравнением второго порядка
![]() , (1)
, (1)
где j - угол поворота, J – суммарный момент инерции, ![]() - коэффициент трения, с - коэффициент упругости, М – момент на валу двигателя (М = к1iвх). Идеальной была бы регулировочная характеристика j = к2М. Чтобы к ней приблизиться, применяют различные корректирующие цепочки и отрицательную обратную связь по углу.
- коэффициент трения, с - коэффициент упругости, М – момент на валу двигателя (М = к1iвх). Идеальной была бы регулировочная характеристика j = к2М. Чтобы к ней приблизиться, применяют различные корректирующие цепочки и отрицательную обратную связь по углу.
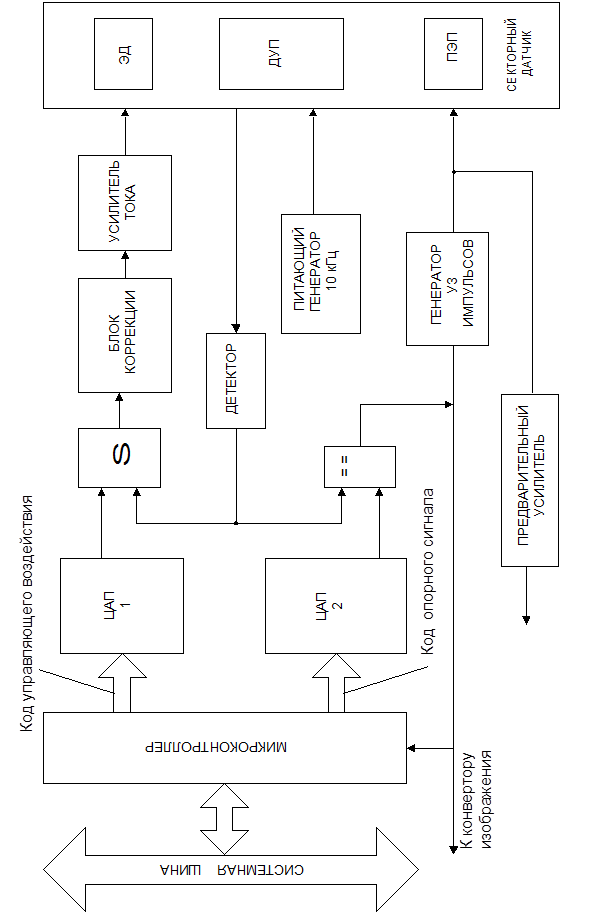
Структурная схема блока управления приведена на рис.2. Параметры режима управления загружаются в микроконтроллер при запуске программы. Он выдает коды управляющего и опорного сигналов на цифро-аналоговые преобразователи ЦАП1 и ЦАП2, которые вырабатывают несколько отличающиеся по форме сигналы. Сигнал ЦАП1 аппроксимирован функцией arctg (t), которая является наиболее оптимальной для динамики подвижной системы. Датчик углового положения ДУП, представляющий собой трансформаторный преобразователь, запитывается от источника переменного тока повышенной частоты и выдает сигнал, пропорциональный углу поворота. Электродвигатель ЭД секторного датчика запитывается током, который является результатом суммирования управляющего сигнала ЦАП1 и сигнала обратной связи, поступающего от детектора. Далее суммарный сигнал в блоке коррекции разветвляется по звеньям – пропорциональному, дифференцирующему и интегрирующему – и затем снова суммируется. Благодаря введению корректирующих звеньев и обратной связи по углу поворота удается свести до минимума влияние первого и второго членов уравнения (1), т.е. максимально приблизить реакцию ![]() к управляющему воздействию.
к управляющему воздействию.
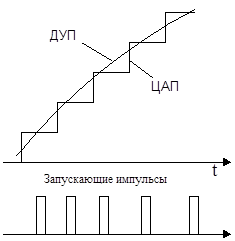
Для посылки зондирующих УЗ импульсов и записи информации по нужному адресу необходимо вырабатывать специальные импульсы с учетом фактического положения ПЭП. Такие импульсы формируются с помощью выходного напряжения датчика углового положения и ЦАП2. На его выходе создается напряжение, близкое по форме к напряжению датчика углового положения (рис 3). Оба напряжения подаются на входы компаратора. В моменты равенства напряжений происходит переключение компаратора, который вырабатывает импульсы запуска. Они запускают генератор зондирующих импульсов и поступают в блок конвертора, где формируют номер луча для адресации памяти. Таким образом, адресация ОЗУ при использовании механического датчика осуществляется непосредственно под его управлением.
Контроллер, кроме того, определяет тип подключенного датчика. Для этого в разъеме датчика устанавливают специальную кодирующую перемычку.
 |
 |
Изучение показывающего и регистрирующего прибора ДИСК–250 Слесарь по КИПиА - это универсальный специалист, выполняющий работы по обслуживанию, ремонту и эксплуатации различного контрольно-измерительного оборудования и систем автоматического уп ...
Определение безотказности РЭУ при наличии резервирования замещением (резерв ненагруженный) Целью данного курсового проектирования является получение (расчетным способом и моделированием отказов на ЭВМ) и сравнение показателей безотказности РЭУ при наличии резервирования замещение ...
Проектирование устройства преобразования и воспроизведения музыкальных звуков Для определения необходимой архитектуры разрабатываемого программно-аппаратного средства, необходимо проанализировать цель и особенности его применения. Основной целью применения разраба ...