МР томограф представляет собой сложную систему, состоящую из большого числа узлов различного назначения и размещенную на большой площади. Сказанное относится в первую очередь к МРТ с резистивным магнитом, которые имеют сложную энергетическую установку для питания главного магнита и систему водяного охлаждения. Что же касается узлов управления градиентной и РЧ системами, то они примерно одинаковы у всех типов МР томографов.
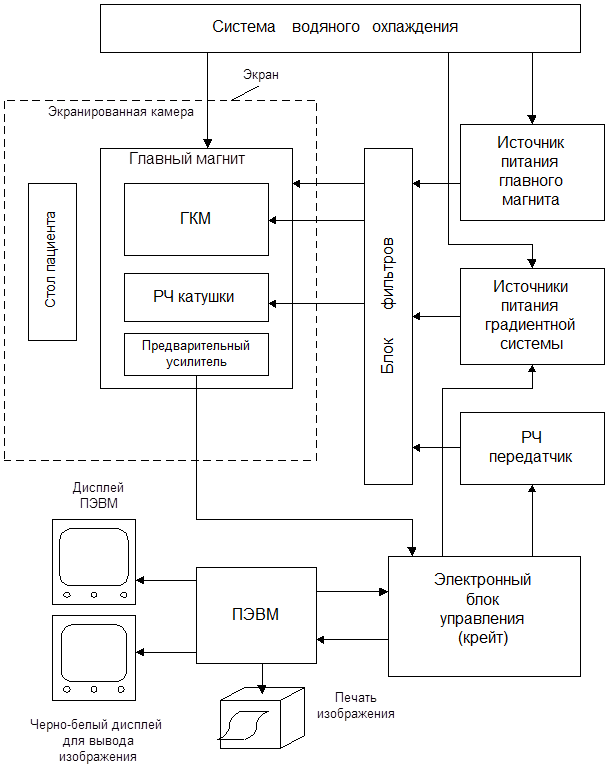
Учитывая, что выпускаются все три типа томографов, рассмотрим, как наиболее общую, структурную схему системы МРТ с резистивным магнитом (рис.1). В отличие от РКТ или УЗ сканеров, где некоторые системы (например, электромеханические узлы сканирования или механические датчики) работают автономно, в МРТ все субсистемы, участвующие в сборе и обработке информации, работают под управлением ЭВМ. Свои управляющие функции ЭВМ осуществляет через электронный блок управления – крейт. Отсюда идут аналоговые и цифровые управляющие сигналы и команды в РЧ передатчик и источники питания градиентных катушек. В этих блоках генерируются сигналы большой мощности и выделяются значительные тепловые потери. Поэтому они оформлены в самостоятельные конструктивные узлы. Источники питания градиентной системы, по существу, представляют собой усилители мощности и размещены в шкафах в одном помещении с источником питания главного магнита. Там же находятся и основные узлы контроля системы охлаждения.
Магнитная система МРТ, которую по аналогии с блоком сканирующего устройства РКТ можно было бы назвать гентри, помещается в специальной комнате, пол, стены и потолок которой обтягиваются тонкой металлической сеткой. Она служит для защиты от помех, проникающих по эфиру от различных источников: станций радио- и телевещания, электротранспорта, местных источников, например мощных аппаратов УВЧ терапии и др. Тем не менее, помехи проникают и вносят искажения в МР-томограммы. И это объяснимо – РЧ сигналы, получаемые от тканей организма, сравнимы по величине с электромагнитными колебаниями, приходящими из эфира и составляют десятки микровольт. Помехи могут проникать также из электросети. Для их подавления все силовые токи – источников питания главного магнита, градиентной системы и передатчика – пропускаются через фильтры. Этой же цели служит применение предварительного усилителя РЧ сигнала, расположенного в непосредственной близости от РЧ катушки для тела. Слабый РЧ сигнал, усиленный до нескольких милливольт с минимальной примесью помех, поступает в крейт, где дополнительно усиливается.
Системе водяного охлаждения отводится важная роль. Вода используется для отвода тепла не только от катушек главного магнита, но и от нагруженных силовых элементов источников питания главного магнита и градиентных систем. Применяют два типа систем водяного охлаждения: статическую и динамическую. В статической системе вода закачивается в резервуар, расположенный на высоте 9-го – 10-го этажа, т.е. создается давление около 3 – 4 атм. Резервуар имеет емкость, достаточную для работы МРТ в течение 1 часа. Динамическая система проще, так как вода подается в систему охлаждения непосредственно из водопроводной сети насосом. Однако стабильность напора воды в ней хуже, а при авариях в водопроводной сети или в системе охлаждения обследование приходится сразу прерывать.
Как и в системе РКТ, в МРТ применяют два монитора: цветной общего назначения и полутоновый черно-белый для вывода изображения. Для получения твердой копии изображения применяют различные принтеры – лазерные, тепловые и другие, которые дают черно-белые (или других оттенков) полутоновые изображения.
 |
Особенностью системы управляющих команд МРТ по сравнению с РКТ и ультразвуковыми сканерами является большой удельный вес аналоговых сигналов. К ним относятся, прежде всего, радиочастотные посылки (несущие колебания и огибающая) и аналоговые напряжения для управления градиентной системой, а также некоторые вспомогательные сигналы. Роль цифровых сигналов в основном сводится к управлению аналоговыми сигналами и формированию временных интервалов. Разумеется, аналоговый РЧ сигнал, принимаемый антенной, преобразуется в цифровой. В основном все сигналы и данные измерения, передаваемые на исполнительные устройства и в ЭВМ, вырабатываются в крейте, структурная схема которого приведена на рис.2.
Контроллер предназначен для организации обмена данными между крейтом и ЭВМ. Он обеспечивает адресацию блоков крейта, трансляцию данных из ЭВМ, прием оцифрованного МР сигнала в последовательном коде по двум каналам, преобразование его в параллельный и ввод в ЭВМ в режиме прямого доступа к памяти. С целью ускорения преобразования вида изображения в нем могут быть предусмотрены для этого аппаратные средства. Например, сравнительно просто и быстро на аппаратном уровне выполняется инверсия изображения «позитив-негатив» с помощью элементов «Исключающее ИЛИ».
Большинство блоков крейта требует для своего функционирования разнообразных импульсов различной частоты и длительности. Их поставляет программатор импульсов, который, в свою очередь, получает необходимую информацию об этих импульсах от контроллера.
В программаторе уровней с помощью нескольких ЦАП, на которые подаются цифровые коды, формируются аналоговые напряжения, предназначенные для задания уровней градиентов, формы огибающей РЧ импульса и ряда других аналоговых сигналов, о которых будет сказано ниже. Так как аналоговых сигналов требуется много, то программатор уровней конструктивно может быть размещен на двух платах.
В радиочастотном блоке находится задающий генератор радиочастотного возбуждающего сигнала, устройство смещения радиочастоты, оконечный усилитель МР сигнала и его детектор.
Блок выбора слоя тесно связан с блоком РЧ, так как в нем формируются необходимые сигналы для организации смещения РЧ частоты и огибающая РЧ импульса.
Хотя индуктивности градиентных катушек сравнительно невелики (несколько десятков мкГн), при подаче градиентных импульсов с крутыми фронтами в них могут возникать нежелательные переходные процессы. В блоке коррекции градиентов происходит автоматическое преобразование прямого фронта напряжения, поступающего от программатора импульсов, в напряжение с линейным фронтом и оптимальной скоростью нарастания, при которой переходный процесс минимален.
Наконец, в блоке АЦП и фильтров формируется цифровой результат преобразования МР-сигнала. Фильтры служат для выбора полосы пропускания, в которой принимается сигнал от выбранного слоя, т.е. в полосе частоты смещения. Таких блоков в крейте также может быть два (два информационных канала).
Как видим из структурной схемы крейта, управляющая электроника МРТ не очень сложна. Во всяком случае, УЗ сканер по насыщенности различными управляющими электронными устройствами значительно превосходит МР томограф. Сложность МРТ заключается в его магнитной системе и программном обеспечении.
Из электронных узлов, обеспечивающих действие системы, наибольший интерес представляют блоки радиочастотной группы. Рассмотрим более подробно задачи, которые она выполняет. Структурная схема, отражающая связь и взаимодействие этой группы блоков изображена на рис.3. Одним из главных требований, предъявляемых к РЧ блоку, является высокая стабильность радиочастоты, что обеспечивается применением кварцевого задающего генератора, который вырабатывает сигнал с частотой f0, определяемой равенством Лармора. Поэтому смещение этой частоты при выборе слоя осуществляется не прямым способом, а путем косвенных нелинейных преобразований, например смешиванием сигналов частоты f0 и частоты смещения.
Смещенный сигнал усиливается по напряжению и по мощности в блоке передатчика, модулируется огибающей с заданным законом изменения и поступает на РЧ катушки по общему коаксиальному фидеру. Соответственно их пространственному расположению пары катушек называются вертикальной (ВК) и горизонтальной (ГК) Для получения вращающегося магнитного поля в цепях каждой пары катушек имеются фазосдвигающие звенья, которые создают сдвиг фаз их токов в 90о.
МР сигнал, получаемый от тела, снимается с тех же катушек, которые служат для возбуждения, и поступает по двум каналам в предварительный усилитель, расположенный поблизости. В нем сигналы каналов объединяются и по общему коаксиальному кабелю приходят на оконечный усилитель МР сигнала. Как было показано, для возбуждения катушек на них подаются большие (сотни вольт) напряжения. Поэтому должны быть предусмотрены меры по защите предусилителя МР сигнала от перенапряжений по входу. При приеме сигнала РЧ катушки, имеющие относительно малое входное сопротивление, могут оказывать шунтирующее действие. Для его исключения также принимают различные меры – нелинейные элементы, коммутирующие устройства, которые отключают РЧ катушки при приеме МР сигнала.
Объединенный МР сигнал детектируется синхронным детектором, который управляется напряжением задающего генератора. В синхронном детекторе МР сигнал разделяется на два канала U и V, сигналы которых находятся в квадратуре (сдвинуты по фазе на 90о) и, по сути, представляют собой физическое воплощение представлений о вращающейся системе координат и ее параметров u и v. Поэтому выбор символов для обозначения каналов не случаен. Далее эти сигналы поступают в два канала АЦП. Применение синхронного детектора продиктовано очень малой величиной МРС. Как известно из теории радиоприема, синхронный детектор обладает хорошей помехоустойчивостью и избирательностью.
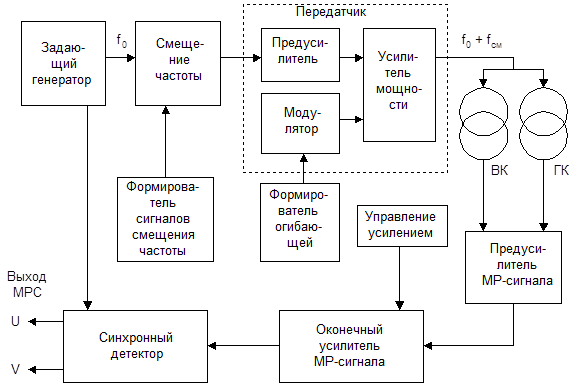 |
Электронные блоки радиочастотной группы конструктивно могут находиться в различных местах. Например, задающий генератор, устройства смещения частоты, оконечный усилитель МРС и детектор могут находиться в блоке РЧ, формирователи сигналов смещения частоты и огибающей – в блоке выбора слоя. Эти два блока находятся в крейте. Передатчик и предусилитель МРС являются отдельными самостоятельными блоками.
Разработка конструкции и технологии изготовления измерителя емкости В повседневной работе радиолюбителей часто приходиться определять данные радиоэлементов. Если измерить сопротивление резистора не составляет особого труда – можно воспользоваться обычны ...
Определение безотказности РЭУ при наличии резервирования замещением (резерв ненагруженный) Целью данного курсового проектирования является получение (расчетным способом и моделированием отказов на ЭВМ) и сравнение показателей безотказности РЭУ при наличии резервирования замещение ...
Проект лабораторного стенда по исследованию приемника АМ сигнала Целью данной работы является моделирование на ЭВМ части радиоприемника и создание пакета лабораторных работ по исследованию отдельных его узлов, а также создание макета лабораторно ...