Использование матричного представления объекта весьма эффективно при анализе и синтезе системы по динамическим показателям. Одним из наиболее современных методов анализа динамики много мерных систем является метод пространства состояний. Под переменными состояния и образуемым ими пространством состояний понимается совокупность величин, позволяющих по известным входным сигналам для t > t0 определить выходные сигналы для t ≥ t0.
В качестве переменных состояния могут приниматься как выходные переменные, так и их производные. Так, для одномерной системы, описываемой дифференциальным уравнением л-го порядка, переменными состояния будут значения у и (n – 1) производных в момент t = 0, позволяющие в дальнейшем при решении дифференциального уравнения классическим методом определить постоянные интегрирования.
Для многомерной системы понятие переменных состояния рассмотрим на примере электропривода с системой управления преобразователь - двигатель при действии на преобразователь двух управляющих воздействий и1 и и2. Динамическая модель такой системы имеет вид:
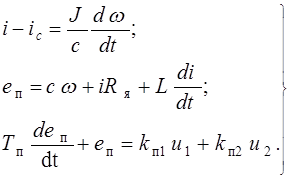 (3.11)
(3.11)
Выберем в качестве переменных состояния интересующие нас величины, приняв их выходами системы, и обозначим их

Запишем выражения для динамической модели объекта в виде системы дифференциальных уравнений в канонической форме:
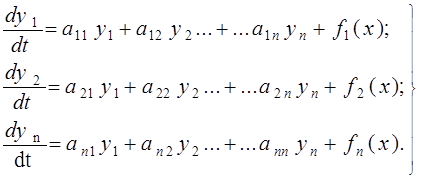 (3.12)
(3.12)
Применительно к примеру система будет иметь вид:
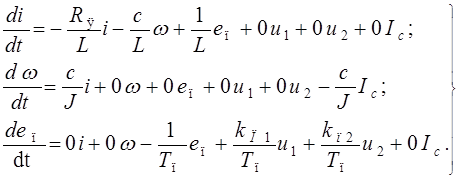 (3.13)
(3.13)
или в матричной форме
![]()
или, если раскрыть матрицы

Здесь Y(f) - столбец неизвестных выходных функций времени или переменных состояния; F (t) — столбец задающих (входных) функций времени; А, В — квадратные матрицы постоянных коэффициентов.
Сравнивая (3.14) с записью дифференциального уравнения первого порядка и располагая формулой его решения
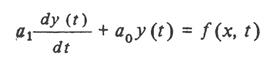
И располагая формулой его решения

где τ — переменная интегрирования, можно доказать, что и для матричного выражения системы дифференциальных уравнений можно напирать аналогичное выражение для ее решения. Здесь матричная экспоненциальная функция еAt может быть представлена рядом системы уравнения вида:

Здесь матричная экспоненциальная функция еAt может быть представлена рядом:

Требуемые для получения временных функций суммирование и умножение матриц выполняются на ЭВМ по типовым программам.
Как и одномерные системы, многомерные решают задачи стабилизации совокупности параметров, программно-следящего их изменения или оптимизации. Перейти на страницу: 1 2 3 4 5 6
Советуем почитать:
Управление динамической системой Теория управления – это наука, изучающая процессы в системах управления с информационной точки зрения, обычно абстрагируясь от физической природы объектов и управляющих устройств. Процес ...
Разработка интеллектуальной системы мониторинга компании GN Nettest для сетей ОКС7, GSM и IN Подсистема контроля и диагностики систем сигнализации ПКД СС QUEST представляет собой интеллектуальную систему мониторинга компании GN Nettest для сетей ОКС7, GSM и IN. Данная система вс ...
Разработка конструкции и технологии изготовления модуля управления временными параметрами Современная микроэлектроника привела к революционным преобразованиям практически во всех отраслях техники, не говоря уже о радиоэлектронной и электронно-вычислительной аппаратуре. Повыше ...