![]()
Если для слежения за таким сигналом применить петлю первого порядка , то преобразование Лапласа ошибки будет иметь вид
и фазовая ошибка j (t) неограниченно возрастает при t®¥, как это следует из применения предельной теоремы. Такой же результат получается для неидеальной петли второго порядка. Таким образом, необходимо применить по меньшей мере идеальную петлю второго порядка. В этом случае
![]()
так что установившаяся фазовая ошибка будет равна

Отсюда следует, что, чем больше величина усиления петли, тем меньше ошибка. Для того чтобы линейная модель, на которой было основано рассмотрение, была применима, фазовая ошибка должна быть мала по сравнению с 1 рад.
Установившуюся ошибку можно свести к нулю при помощи петли третьего порядка. Для этого необходимо ввести в фильтр петли второй интегратор, как показано на рис. П.2.6 Передаточная функция фильтра будет
![]()
Тогда передаточная функция замкнутой петли примет вид
![]()
и преобразование Лапласа фазовой ошибки будет равно

откуда следует, что установившаяся фазовая ошибка равна нулю.
Рассмотренные выше случаи сведены в табл.1. Из нее видно, в частности, что для отслеживания постоянной частоты (или угловой скорости) с конечной ошибкой достаточно применить петлю первого порядка, а для отслеживания линейно изменяющейся частоты (или углового ускорения) с конечной ошибкой необходима петля второго порядка. Увеличение на единицу порядка системы приводит к устранению установившейся ошибки, а понижение порядка на единицу приводит к неограниченному возрастанию ошибки.
Эти замечания справедливы для всех линейных систем регулирования.
Однако полученные количественные соотношения основаны на предположении о малости ошибки, которое дало возможность воспользоваться линейной моделью.
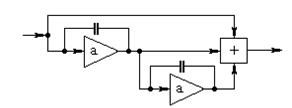
Рис. П.2.6 Схема фильтра петли регулирования ФАП-3
Таблица 1
| Фаза принимаемого сигнала | Порядок системы | Передаточная функция фильтра | Передаточная функция замкнутой системы | Установившаяся ошибка | Шумовая полоса ФАП |
| wt+q0 | первый | 1 | AK/ (p+AK) | (w-w0) /AK | AK/4 |
| wt+q0 | второй | 1+a/p | AK (p+a) / (p2 +Akp+Aka) | 0 | (AK+а) /4 |
| wt+q0 | второй (неидеальной) | (p+a) / (p+e) | AK (p+a) / (p2 + (Ak+e) +Aka) | (e/a) ( (w-w0) /AK) | (АК/4) * |
| 1/2 (Rt2+wt+q0) | второй | 1+a/p | AK (p+a) / (p2 +Akp+Aka) | R/aAK | (AK+а) /4 |
| 1/2 (Rt2+wt+q0) | Третий | 1+a/s+b/ s2 | AK (s2+as+b) / (s3 +Aks2+aAks+bAK) | 0 | (АК/4) * |
Разработка микропроцессорной системы управления объектом Микропроцессорная система (далее МПС) предназначена для управления некоторыми объектами. Рисунок 1 - Структурная схема связи МПС с внешними объектами. Согласно рисунку ...
Микропроцессорная система управления скоростью вращения двигателя постоянного тока Одной из характерных особенностей нынешнего этапа научно-технического прогресса является все большее применение микроэлектроники. Особое внимание в настоящее время уделяется внедрению ми ...
Применение метода вейвлет-кодирования для сжатия и реконструкции физиологической информации, передаваемой по каналу радиотелеметрии Современная медицина неразрывно связана с применением различных диагностических и терапевтических приборов и тенденция к дальнейшему внедрению технических средств в медико-биологическую прак ...