Задачи проектирования систем управления на локальном уровне, чаще всего, касаются систем электроприводов, выполняющих определенные рабочие движения. В технологическом оборудовании машиностроительного производства используются регулируемые и следящие электроприводы с двигателями постоянного или переменного тока.
Пример функциональной схемы следящего электропривода с двигателем постоянного тока приведен на рисунке 2.1.
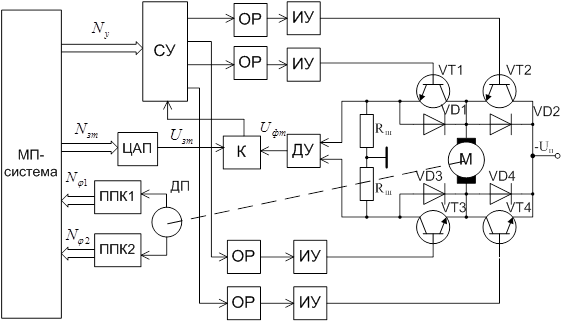
Рисунок 2.1 – Функциональная схема следящего электропривода с ШИП и релейным контуром тока
В этом следящем электроприводе измерительная система имеет двухотсчетный преобразователь перемещение-код (ППК1 и ППК2). В контуре тока в качестве датчиков обратной связи применены шунты RШ. Для усиления напряжения, которое снимается с шунтов (UШ = 0 .75 мВ), и формирования двухполярного сигнала используется дифференциальный усилитель ДУ. Выходное напряжение усилителя ![]() , соответствующее фактическому значению тока, через гальваническую развязку поступает на один вход компаратора К, а на другой подается выходное напряжение цифро-аналогового преобразователя (ЦАП), который преобразует код задания тока
, соответствующее фактическому значению тока, через гальваническую развязку поступает на один вход компаратора К, а на другой подается выходное напряжение цифро-аналогового преобразователя (ЦАП), который преобразует код задания тока ![]() в аналоговый сигнал задания
в аналоговый сигнал задания ![]() .
.
Логический сигнал с выхода компаратора поступает на схему управления СУ, которая предназначена для преобразования кода управления ![]() в длительности импульсов переключения силовых транзисторов. Эти импульсы через оптронную развязку ОР и импульсные усилители ИУ подаются на базы транзисторных ключей VT1…VT4, образующих мостовую схему. С целью устранения сквозных токов при переключении пар организуется безтоковая пауза. В качестве силовых элементов применены биполярные транзисторы ТКД.
в длительности импульсов переключения силовых транзисторов. Эти импульсы через оптронную развязку ОР и импульсные усилители ИУ подаются на базы транзисторных ключей VT1…VT4, образующих мостовую схему. С целью устранения сквозных токов при переключении пар организуется безтоковая пауза. В качестве силовых элементов применены биполярные транзисторы ТКД.
Информация с преобразователей перемещение-код сравнивается с кодом задания, ошибка обрабатывается с помощью программы регулятора, который выполняет расчет кода управления ![]() и уровня ограничения тока
и уровня ограничения тока ![]() в функции скорости. Для регулирования приняты: пропорциональный закон в контуре положения с введением сигнала компенсации скоростной ошибки и пропорционально-интегрально-дифференциальный (ПИД) закон в контуре скорости. Период дискретности системы управления составляет 1 мс.
в функции скорости. Для регулирования приняты: пропорциональный закон в контуре положения с введением сигнала компенсации скоростной ошибки и пропорционально-интегрально-дифференциальный (ПИД) закон в контуре скорости. Период дискретности системы управления составляет 1 мс.
На рынке Украины широко представлены микроконтроллеры известных фирм SIEMENS, ABB, INTEL и многих других. Микропроцессоры серии ARM7 компании PHILIPS не уступают аналогам по техническими и экономическими характеристиками. Преимуществом микропроцессоров данной серии есть большое количество технической документации и легкий доступ к ней.
Структурная схема микроконтроллера LPC2148 представлена на рис. 2.2.
Для работы контроллера необходимо одно источник питания +3В. Через два программируемых порта ввода/вывода LPC2148 взаимодействует со средой в стандарте ТТЛ-схем с тремя состояниями выхода.
Важной особенностью АЛУ является его способность оперировать не только байтами, но и битами.
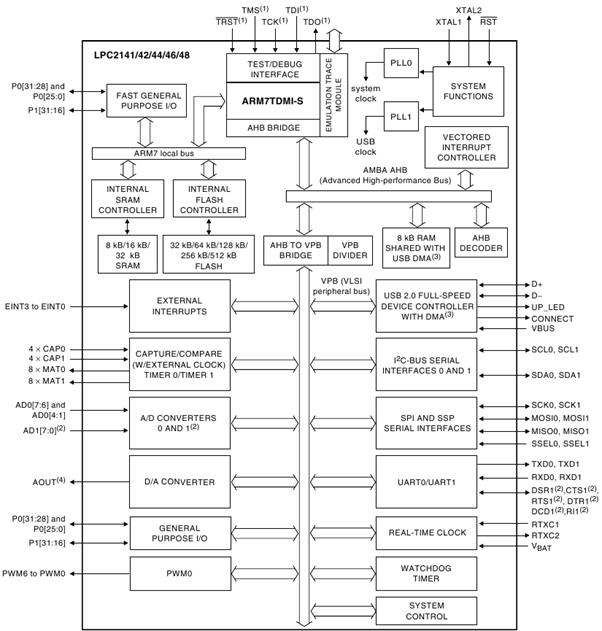
Рисунок 2.2 – Структурная схема микроконтроллера LPC2148
Контроллер LPC2148 как видно из рисунка имеет:
тестовый интерфейс, позволяющий проводить пошаговое выполнение программы;
ОЗУ память ;
FLASH память;
векторный контроллер прерываний;
интерфейсы SSP, SPI, I2C;
два UART;
часы реального времени;
ЦАП ;
два АЦП;
два таймера захвата/сравнения;
WDT;
Два режима работы обычный и экономный;
Кварцевый резонатор, который подключается к внешним выводам ХTAL1 и ХTAL2, управляет работой внутреннего генератора, который в свою очередь формирует сигналы синхронизации.
Советуем почитать:
Разработка математической модели электронного устройства Развитие вычислительной техники и повышение требований к разрабатываемой электронной аппаратуре выдвинули на первый план создание систем автоматизированного проектирования. До начала ше ...
Разработка сети кампуса с возможностью выхода во внешнюю среду В рамках текущего проекта, фактически, требовалось разработать сеть кампуса, которая, однако, имеет выход во внешнюю среду. Сети кампуса объединяют множество сетей различных отделов одн ...
Кривые линии и поверхности, их применение в радиоэлектронике и автоматике Кривые линии и поверхности их применение в радиоэлектронике и автоматике. Этот раздел курса имеет особое значение для графической подготовки инженера. Внешняя и внутренняя форма дета ...