Arduino Duemilanove
Рисунок 2. Arduino Duemilanove
Общие сведения
Arduino Duemilanove («2009») построена на одном из микроконтроллеров: ATmega168 (техническое описание) или ATmega328 (техническое описание). Платформа содержит 14 цифровых вход/выходов (6 из которых могут использоваться как выходы ШИМ), 6 аналоговых входов, кварцевый генератор 16 МГц, разъем USB, силовой разъем, разъем ICSP и кнопку перезагрузки. Для работы необходимо подключить платформу к компьютеру посредством кабеля USB или подать питание при помощи адаптера AC/DC, или батареи.
Duemilanove (в переводе с итальянского – 2009) была названа в честь года своего выпуска – 2009 год. Данная платформа является последней из серии Arduino с USB. Для сравнения с предыдущими версиями необходимо обратиться к полному списку плат Arduino.
Характеристики
Микроконтроллер ATmega168
Рабочее напряжение 5 В
Входное напряжение (рекомендуемое) 7-12 В
Входное напряжение (предельное) 6-20 В
Цифровые Входы/Выходы 14 (6 из которых могут использоваться как выходы ШИМ)
Аналоговые входы 6
Постоянный ток через вход/выход 40 мА
Постоянный ток для вывода 3.3 В 50 мА
Флеш-память 16 Кб (ATmega168) или 32 Кб (ATmega328) при этом 2 Кб используются для загрузчика
ОЗУ 1 Кб (ATmega168) или 2 Кб (ATmega328)
EEPROM 512 байт (ATmega168) или 1 Кб (ATmega328)
Тактовая частота 16 МГц
Схема и исходные данные
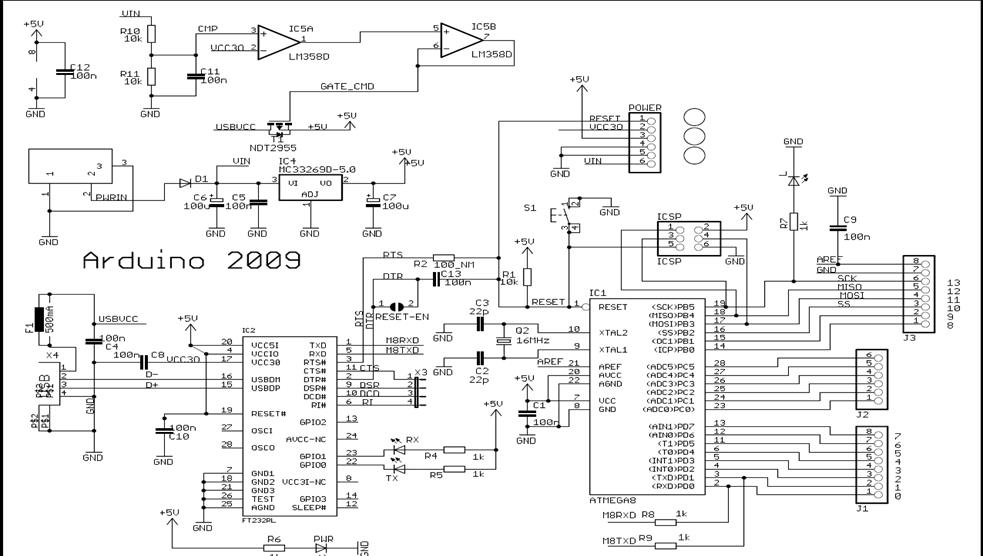
Рисунок 3. Принципиальная схема Arduino Duemilanove
Питание
Arduino Duemilanove может получать питание через подключение USB или от внешнего источника питания. Источник питания выбирается автоматически.
Внешнее питание (не USB) может подаваться через преобразователь напряжения AC/DC (блок питания) или аккумуляторной батареей. Преобразователь напряжения подключается посредством разъема 2.1 мм с центральным положительным полюсом. Провода от батареи подключаются к выводам Gnd и Vin разъема питания.
Платформа может работать при внешнем питании от 6 В до 20 В. При напряжении питания ниже 7 В, вывод 5V может выдавать менее 5 В, при этом платформа может работать нестабильно. При использовании напряжения выше 12 В регулятор напряжения может перегреться и повредить плату. Рекомендуемый диапазон от 7 В до 12 В.
Выводы питания:
VIN. Вход используется для подачи питания от внешнего источника (в отсутствие 5 В от разъема USB или другого регулируемого источника питания). Подача напряжения питания происходит через данный вывод.
5V. Регулируемый источник напряжения, используемый для питания микроконтроллера и компонентов на плате. Питание может подаваться от вывода VIN через регулятор напряжения, или от разъема USB, или другого регулируемого источника напряжения 5 В.
3V3. Напряжение на выводе 3.3 В генерируемое микросхемой FTDI на платформе. Максимальное потребление тока 50 мА.
GND. Выводы заземления.
Память
Микроконтроллер ATmega168 имеет 16 кБ флеш-памяти для хранения кода программы, а микроконтроллер ATmega328, в свою очередь, имеет 32 кБ (в обоих случаях 2 кБ используется для хранения загрузчика). ATmega168 имеет 1 кБ ОЗУ и 512 байт EEPROM (которая читается и записывается с помощью библиотеки EEPROM), а ATmega328 – 2 кБ ОЗУ и 1 Кб EEPROM.
Входы и Выходы
Каждый из 14 цифровых выводов Duemilanove, используя функции pinMode(), digitalWrite(), и digitalRead(), может настраиваться как вход или выход. Выводы работают при напряжении 5 В. Каждый вывод имеет нагрузочный резистор (стандартно отключен) 20-50 кОм и может пропускать до 40 мА. Некоторые выводы имеют особые функции:
Последовательная шина: 0 (RX) и 1 (TX). Выводы используются для получения (RX) и передачи (TX) данных TTL. Данные выводы подключены к соответствующим выводам микросхемы последовательной шины FTDI USB-to-TTL.
Внешнее прерывание: 2 и 3. Данные выводы могут быть сконфигурированы на вызов прерывания либо на младшем значении, либо на переднем или заднем фронте, или при изменении значения. Подробная информация находится в описании функции attachInterrupt().
ШИМ: 3, 5, 6, 9, 10, и 11. Любой из выводов обеспечивает ШИМ с разрешением 8 бит при помощи функции analogWrite().
SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK). Посредством данных выводов осуществляется связь SPI, которая, хотя и поддерживается аппаратной частью, не включена в язык Arduino. Перейти на страницу: 1 2 3
Советуем почитать:
Моделирование голограммы, получаемой с помощью подповерхностного сканирующего радиолокатора Современные радиолокаторы можно условно разделить условно на два класса: радиолокаторы в которых используются видеоимпульсные сигналы и радиолокаторы с использованием гармонических модулиро ...
Имитационное моделирование системы фазовой автоподстройки частоты в пакете моделирования динамических систем Simulink Цель работы: Изучить методы имитационного моделирования системы автоматического регулирования и исследования основных характеристик систем фазовой автоподстройки частоты (ФАП). Домашн ...
Прием и выплата электронных переводов В октябре 2007г. ФГУП "Почта работы" начала реализацию проекта по Модернизаций системы электронных переводов. Основная цель проекта-Повысить доступность и качество оказываемых ...