Цель работы: Изучить методы имитационного моделирования системы автоматического регулирования и исследования основных характеристик систем фазовой автоподстройки частоты (ФАП).
Домашнее задание
1. Составить математическую модель ФАП 1-го порядка и 2-го порядка.
2. Построить передаточные характеристики ФАП 1-го порядка и 2-го порядка с идеальным и неидеальным интегратором.
3. Используя передаточные характеристики определить шумовую полосу ФАП 1-го порядка и 2-го порядка и сравнить с расчетными выражениями.
4. Определить полосу захвата и удержания ФАП 1-го порядка.
Лабораторное задание
Моделирование систем передачи дискретных сообщений (ПДС) и их функциональных узлов на ЭВМ является экономичным способом их исследования и проектирования. Оно позволяет значительно ускорить процесс разработки и найти наиболее оптимальные характеристики их функционирования.
Моделирование на ЭВМ можно условно разбить на следующие этапы:
· формулировка задачи моделирования, разработка модели системы или устройства и программы их исследования;
· составление модели;
· моделирование системы ПДС или устройства при заданных режимах работы и внешних воздействиях;
· интерпретация результатов моделирования, т.е. построение различных выводов о функционировании объекта по данным, полученным в результате моделирования.
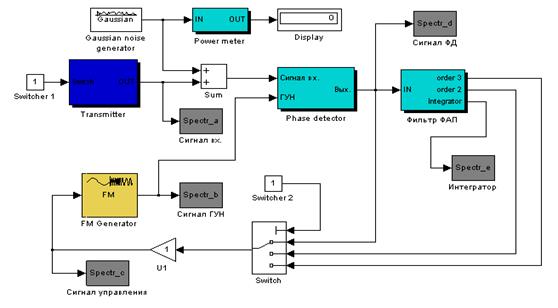
Рис.1. Структурная схема имитационной модели системы ФАП первого, второго и третьего порядка с контрольно-измерительными блоками: Power meter - измеритель мощности; Spectr_a, b, c, d, e - осциллографы и анализаторы спектра
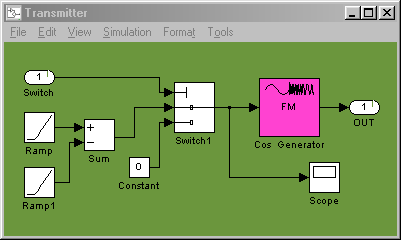
Рис.2 Имитационная модель генератора входного сигнала ФАП с постоянной и линейно-изменяющейся частотной расстройкой.
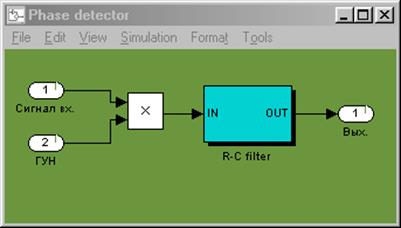
Рис.3. Имитационная модель фазового детектора.
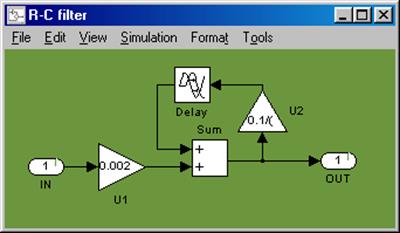
Рис.4 Имитационная модель ФНЧ фазового детектора.
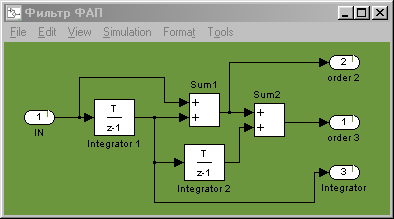
Рис.5 Имитационная модель фильтра первого и второго порядка кольца ФАП второго и третьего порядка соответственно.
1. Построить модель фазовой автоподстройки частоты (ФАПЧ) в пакете моделирования динамических систем Simulink. Для этого открыть новое окно модели Simulink. В библиотечном модуле в соответствующих разделах найти типовые функциональные блоки структурной схемы модели ФАП и скопировать их в окно модели. Соединить входы и выходы блоков в соответствии с рис.1.
2. Настроить общие параметры модели. Для этого необходимо выполнить команду Parameters в позиции Simulation главного меню пакета Simulink. Откроется окно параметров модели. В закладке Solver установить время моделирования (Stop time) равным 5 секунд. Выбрать метод изменения независимых переменных с фиксированным шагом (Type: Fixed-step) и метод решения дифференциальных уравнений при моделировании дискретный (discrete (no continuous states)). Установить время дискретизации (Fixed Step Size) для модели, исходя из следующих предпосылок: для сигналов генераторов с частотой 10 Гц на один период колебания должно приходится 40 отсчетов времени.
3. Настроить параметры каждого функционального блока структурной схемы. Указать, если требуется, в настройках блока время дискретизации (Sample time). Установить частоты опорного и управляемого генераторов равными 10 Гц (если требуется указать значение в рад/с, ввести выражение 2*pi*f, где f - частота в герцах). Установить разность фаз между фазами опорного и управляемого генераторов (j = jг - jо) равной 90о (pi/2), при которой полезная составляющая на выходе фазового детектора равна нулю. Проконтролировать установленные параметры генераторов, сравнивая осциллограммы их выходных сигналов
4. Установить постоянную времени RC-фильтра, включенного в блок фазового детектора, обеспечивающую подавление удвоенной частоты входного сигнала на его выходе в 10 раз, снять импульсную и передаточную характеристики фильтра, используя спектроанализатор.
5. Снять передаточную характеристику идеального пропорционально - интегрирующего фильтра (ПИФ) схемы ФАП, определяемой выражением F (p) = (1 + a/p), где а - коэффициент передачи интегрирующей ветви ПИФ, р - оператор Лапласа. Принять значение а в диапазоне с шагом 5.
6. Оборвать петлю обратной связи ФАП. Подключив измеритель средних значений сигнала к выходу фильтра детектора, путем изменения значения фазы входного сигнала в интервале j Í , снять дискриминационную характеристику Uд = h (j) фазового детектора.
7. К входу ГУН подключить источник постоянного напряжения и путем изменения его величины в диапазоне с шагом 0.5 измерить крутизну ГУН и построить характеристику управления Dfу = f (Uу).
8. Подключив генератор пилообразного напряжения к входу генератора входного сигнала, управляемого напряжением, и установив начальную расстройку Df собственных частот генератора входного сигнала и ГУН, обеспечивающую отсутствие захвата, определить полосу захвата ФАП 1-го и 2-го порядка.
9. Подключив генератор пилообразного напряжения к входу генератора входного сигнала, управляемого напряжением, и установив нулевую начальную расстройку Df собственных частот генератора входного сигнала и ГУН, определить полосу удержания ФАП 1-го и 2-го порядка.
10. Анализируя сигнал управления на входе ГУН, определить время ввода в синхронизм ФАП 1-го и 2-го порядка при начальных расстройках в диапазоне значений с шагом 1.
11. Построить зависимость полосы захвата ФАП 1-го и 2-го порядка от коэффициента усиления петли обратной связи ФАП. Коэффициент усиления менять от 10 до 4 с шагом 2.
12. Подключить к входу ФАП гармонический сигнал с начальной расстройкой в пределах полосы захвата и сигнал с выхода генератора нормального шума. С помощью измерителя средне - квадратичных значений определить дисперсию сигнала управления и величину фазового джиттера сигнала ГУН, а также определить отношение сигнал-шум внутри кольца ФАП и на ее входе.
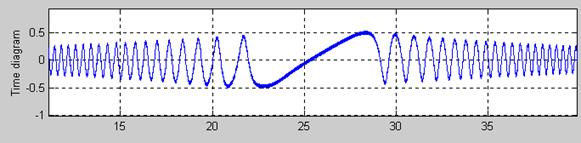
Рис.6. Временная диаграмма сигнала управления ГУН ФАП первого порядка при линейном изменении частоты входного сигнала, иллюстрирующая режимы биений, захвата, удержания и срыва синхронизма: Sу = 1 Гц/В, время анализа 40 с, скорость изменения частоты входного сигнала 0.2 Гц/с, полоса удержания равна полосе захвата Δfуд = Δfз = 1 Гц, режим слежения наблюдается на временном интервале tÎ с.
- Основные определения
- Элементы теории систем фазового регулирования. Система фазовой автоподстройки частоты
- Линейное приближение и переходный процесс
Система автоматического регулирование температуры теплоносителя зерносушилки Техническое задание на проектирование включает в себя исходные данные, позволяющие произвести синтез системы. К ним относятся функциональная схема нескорректированной САУ, сведения о при ...
Источники питания электронных устройств Применение различного рода электронных устройств для управления производственными процессами подразумевает использование электрической энергии определенного вида для их питания (постоян ...
Прием и выплата электронных переводов В октябре 2007г. ФГУП "Почта работы" начала реализацию проекта по Модернизаций системы электронных переводов. Основная цель проекта-Повысить доступность и качество оказываемых ...