 .
.
Обозначим ![]() . Тогда
. Тогда ![]() ;
; ![]() .
.
Сигнал на выходе делителя (DA3) определяется приращением токов I1 и I2 :
![]() ;
; ![]() .
.
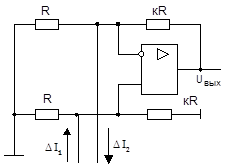
Выходной сигнал определяется из эквивалентной схемы рис. 10:
![]() , где
, где ![]() =
= ![]() =
=![]() . После подстановки сюда величины
. После подстановки сюда величины ![]() получаем
получаем ![]() , или
, или ![]() .
.
Производя подстановку выражения для а, находим
![]() ,
,
и окончательно ![]() (9)
(9)
Энергетический корректор координатных сигналов, выполненный согласно рис.8, предполагает формирование сигналов X, Y и Z по структурной схеме рис.10. При этом для получения координатных сигналов требуются вычитатели суммарных координатных сигналов полуплоскостей. Если же X и Z представить в форме X = X+ –X– и Z = X+ +X–, то схемы корректоров существенно упрощаются. Тогда сигналы Z + X/n и Z – X/n примут вид
![]() и
и ![]() (10)
(10)
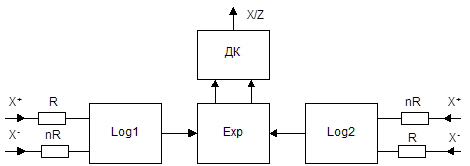
Из формул (10) видно, что слагаемые в правых частях представляют собой униполярные сигналы и, таким образом, отпадает необходимость в инверторе и вычитателях. Тем самым достигается лучшая симметрия схемы, уменьшаются задержки. Структурная схема корректора с таким представлением координатных сигналов приведена на рис.11. Его выходной сигнал определяется формулой
![]() (11)
(11)
где X = X+ – X– , Z = X++X – .
Оптимальная величина n лежит в диапазоне 2 …3, а к – в диапазоне 1 …2.
Для выполнения схемы корректора применяют быстродействующие операционные усилители и транзисторы, что позволяет производить деление импульсов с частотой до 500 кГц. Как следует из предыдущего описания, на входы корректора поступают прямоугольные импульсы от интеграторов. Однако на его выходе все же возникают выбросы. Для их устранения используют устройства выборки-хранения.
 |
|
Перейти на страницу: 1 2 3 4 5 6
Советуем почитать:
Исследование и разработка программ расчета источников вторичного электропитания на ЭВМ Название темы дипломной работы "Исследование и разработка программ расчета источников вторичного электропитания (ИВЭ) на ЭВМ". Целью работы является исследование способов орган ...
Проектирование управляемого привода в электромеханических системах Управляемый электропривод получил широкое применение во всех сферах жизни и деятельности общества от промышленного производства до бытовой техники. Широта применения определяет исключит ...
Многопроцессорный вычислительный комплекс Вычислительная техника в своем развитии по пути повышения быстродействия ЭВМ приблизилась к физическим пределам, которые обусловлены ограниченной скоростью распространения сигналов в лин ...