Однако, в силу того что механический секторный датчик является инерционной асинхронной системой, цифровые отсчеты сигнала для одних и тех же r и j, могут меняться от кадра к кадру, причем эти изменения могут носить повторяющийся характер. Возникают так называемые муаровые искажения
в виде правильных узоров, которые мешают восприятию изображения. Подобные искажения появляются на экране телевизора при нарушениях синхронизации.
Для устранения этого недостатка применяют интерполяцию, или усреднение цифровых отсчетов. Сущность интерполяции поясняет рис.2. Точки a, b, c и d принадлежат полярной системе координат, а точка e – декартовой.
Этими же буквами будем обозначать величины цифровых отсчетов, в этих точках. Координаты точек полярной системы определяются по формулам (1). Из них выделяются целые части r и j, и дробные ![]() и
и ![]() . Задача интерполяции заключается в том, чтобы по известным отсчетам a, b, c, d полярной системы получить отсчет е декартовой системы. Для частного случая расположения точки е, показанного слева, величина е зависит только от а и b: e = a(1-Dj) + bDj.
. Задача интерполяции заключается в том, чтобы по известным отсчетам a, b, c, d полярной системы получить отсчет е декартовой системы. Для частного случая расположения точки е, показанного слева, величина е зависит только от а и b: e = a(1-Dj) + bDj.
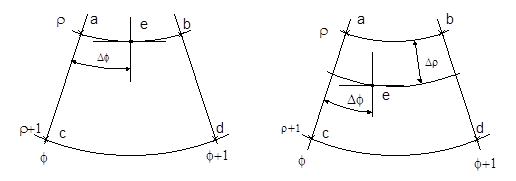 |
Рисунок 2. Интерполяция цифровых отсчетов.
Понятно, что если точка е находится посредине между точками а и b, то отсчет е равен их полусумме. В общем случае, показанном справа, информация, которая должна быть присвоена точке е, определяется отсчетами всех четырех точек полярной системы:
![]() .
. ![]() (2)
(2)
Коэффициенты при отсчетах а, b, c, d называются коэффициентами интерполяции. Благодаря процедуре интерполяции осуществляется плавный переход по яркости от точке к точке в декартовой системе координат, т.е. на экране монитора, и тем самым исключаются муаровые искажения. Вычисления согласно алгоритму (2) в конверторе выполняет специальное устройство, называемое интерполятором. В него входят преобразователь координат, перемножающие устройства, к нему же можно отнести и буферное ОЗУ.
Причем, буферное ОЗУ состоит из двух идентичных половин. Это сделано для упрощения и ускорения процесса записи-считывания: когда в одну половину идет запись информации от датчика, то из другой половины производится ее считывание в экранное ОЗУ. Аналогично организована и экранная память: она также состоит из двух половин, и когда в одну половину идет запись из буферной памяти, из другой производится вывод информации на экран.
Так как обработка информации идет в темпе реального времени, то все вычислительные операции, связанные с интерполяцией, выполняются аппаратными средствами, ибо даже самая быстродействующая ЭВМ не успеет это сделать программным способом.
Например, преобразование координат и вычисление коэффициентов интерполяции в алгоритме (2) производится с помощью ПЗУ, а операции умножения – специальными микросхемами цифровых перемножителей. Все описанные выше сложные преобразования не требуются при использовании линейных датчиков, так как они органично вписываются в систему декартовых координат и работают совершенно синхронно с системой развертки изображения на экране.
Конвертор изображения представляет собой устройство, состоящее из большого количества узлов с многочисленными связями. Поэтому рассмотрим его по частям, причем в основном уделим внимание особенностям, связанным с применением датчиков для углового сканирования. На рис.4 показана часть структурной схемы, в которой отражена адресация памяти, преобразование координат и вычисление коэффициентов интерполяции.
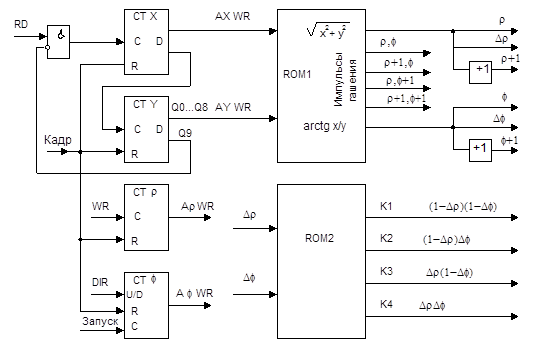 |
Рисунок 3. Формирователь адресов памяти и преобразователь координат.
Рассмотрим, как происходит формирование адресов памяти и преобразование координат при использовании секторного механического датчика. Запись в буферное ОЗУ производится под управлением счетчиков СТr и СТj.
Допустим, что число отсчетов по глубине равно 512, а по углу – 256. Тогда счетчик СТ![]() должен быть 9-разрядным, а СТj - 8-разрядным. Кроме того, счетчик СТj должен быть реверсивным. Его направление счета переключается специальным сигналом DIR, указывающим направление движения ПЭП (например, DIR = 1 – прямой ход, а DIR = 0 – обратный). Этот сигнал поступает от системы управления. Счетчик СТ
должен быть 9-разрядным, а СТj - 8-разрядным. Кроме того, счетчик СТj должен быть реверсивным. Его направление счета переключается специальным сигналом DIR, указывающим направление движения ПЭП (например, DIR = 1 – прямой ход, а DIR = 0 – обратный). Этот сигнал поступает от системы управления. Счетчик СТ![]() тактируется импульсом «Запуск», поступающим от блока управления секторным датчиком. Перейти на страницу: 1 2 3
тактируется импульсом «Запуск», поступающим от блока управления секторным датчиком. Перейти на страницу: 1 2 3
Идентификация технологических объектов управления Объективные закономерности, присущие процессам переработки информации, обусловливают аналогию функциональных структур человека-оператора и управляющего устройства любого типа. Эта аналог ...
Разработка датчика сетки частот генератора сигналов низкой частоты Измерением называется физический опыт, в результате которого находят численное значение измеряемой физической величины. Измерения являются важнейшим этапом деятельности работников всех ...
Проект компьютерной сети для коммерческого предприятия НордСофт Вхождение России в мировое информационное пространство влечет за собой широчайшее использование новейших информационных технологий, и в первую очередь, компьютерных сетей. При этом резк ...