Первым этапом любой цифровой обработки аналоговых сигналов является их аналого-цифровое преобразование.
Произведем оценку необходимой скорости такого преобразования для целей визуализации УЗ изображения. Допустим, что максимальная глубина локации составляет 200 мм, а количество отсчетов вдоль луча равно 512. Тогда полное время движения луча (туда и обратно) будет равно
Тл = ![]() мкс,
мкс,
а время, необходимое для получения одного цифрового отсчета
Тотс = 270/512 = 0,53 мкс.
При меньшей глубине локации, например, 50 мм (исследование щитовидной железы) время одного отсчета сократится до 0,13 мкс, что соответствует частоте преобразования 7,7 МГц.
Такую высокую скорость преобразования обеспечивают АЦП параллельного преобразования. Они выпускаются шести- и восьмиразрядными с частотами преобразования от 20 до 100 МГц.
Соответственно для запоминания цифровой информации требуется память с 6-битной или 8-битной (байтной) организацией ячеек. Как уже отмечалось раньше, изображение обычно формируется из 512 ![]() 512 пикселов с количеством градаций яркости 26 или 28 . Выпускаются также и 16-разрядные АЦП параллельного преобразования.
512 пикселов с количеством градаций яркости 26 или 28 . Выпускаются также и 16-разрядные АЦП параллельного преобразования.
Темпы формирования одного кадра УЗ изображения сравнительно невелики. Выше говорилось, что секторные механические датчики имеют скорость качаний около 10 1/c.
Электронно-управляемые линейные и конвексные датчики, в принципе, могли бы обеспечить более высокий темп сканирования, однако он жестко определяется глубиной локации и количеством элементов пьезорешетки.
Например, при количестве элементов 256 и глубине локации 200 мм общее время сканирования, т.е. время одного кадра УЗ изображения, составит ориентировочно ![]() мс. Следовательно, частота УЗ кадров будет равна примерно 14 кадров/c. Как видим, темпы формирования УЗ изображения датчиками ниже 24 кадров в секунду и если их не изменять при выводе на экран, то будут наблюдаться мерцания изображения.
мс. Следовательно, частота УЗ кадров будет равна примерно 14 кадров/c. Как видим, темпы формирования УЗ изображения датчиками ниже 24 кадров в секунду и если их не изменять при выводе на экран, то будут наблюдаться мерцания изображения.
Для исключения этого недостатка оперативную память делают двухступенчатой: первая ступень – буферная память, вторая ступень – экранная. В буферную память записывают цифровую информацию в темпе сканирования используемого датчика. Затем информация переписывается в экранную память и далее выводится на экран в темпе кадровой развертки монитора – 60 - 70 кадров/c.
Еще одной специфической проблемой цифрового преобразования УЗ сканеров является получение изображения от секторного (механического или конвексного) датчика в естественной секторной форме. Для этого нужно привести в соответствие полярную систему цифровых отсчетов, присущую секторному датчику, и прямоугольную, в которой работает система строчно-кадровой развертки монитора.
Поясним сказанное рисунком (рис.1). Слева показан кадр УЗ изображения. По сигналам, поступающим от датчика углового положения, производится пуск УЗ лучей и их подсчет, т.е. указывается дискретное значение угла.
Вдоль каждого луча с помощью АЦП делаются цифровые отсчеты эхо-сигнала, и каждому отсчету присваивается номер (дискретное значение глубины). Справа показан прямоугольный растр монитора и размещение в нем секторного изображения.
Координаты пиксела Х и Y представляют собой соответственно номер отсчета вдоль строки и номер строки. Как видно из рисунка, точки отсчетов в прямоугольной и полярной системах координат в общем случае не совпадают.
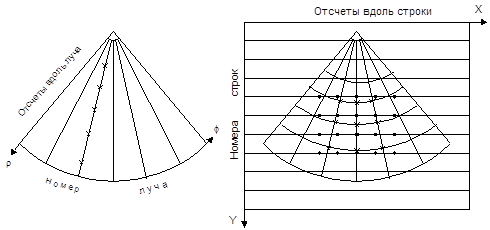 |
Рисунок 1. Построение веерного растра на экране монитора.
И они не могут совпадать, так как их координаты связаны иррациональными соотношениями:
![]() ;
; ![]() . (1)
. (1)
Координаты x и y обязательно должны быть целыми, а r и j, определяемые формулами (1), получаются дробными. Но, с другой стороны, отсчеты r и j, формируемые при записи в буферную память, также являются целыми числами.
Возникает противоречие. Оно разрешается тем, что инициатором преобразования координат выступает декартова система, т.е. система развертки монитора. Она задает координаты x и y, а по формулам (1) вычисляются координаты полярной системы. В наиболее простом случае они округляются до ближайших целых значений. Перейти на страницу: 1 2 3
Советуем почитать:
Имитационное моделирование системы фазовой автоподстройки частоты в пакете моделирования динамических систем Simulink Цель работы: Изучить методы имитационного моделирования системы автоматического регулирования и исследования основных характеристик систем фазовой автоподстройки частоты (ФАП). Домашн ...
Защита информации от утечки по цепям питания Циркулирующая в тех или иных технических средствах конфиденциальная информация может попасть в цепи и сети электрического питания и через них выйти за пределы контролируемой зоны. Наприм ...
Разработка датчика сетки частот генератора сигналов низкой частоты Измерением называется физический опыт, в результате которого находят численное значение измеряемой физической величины. Измерения являются важнейшим этапом деятельности работников всех ...