При этом счетчик формирует номер луча. Счетчик СТ![]() тактируется импульсами WR, которые начинают поступать сразу после прихода сигнала «Запуск».
тактируется импульсами WR, которые начинают поступать сразу после прихода сигнала «Запуск».
Счетчики СТХ и СТY поставляют адреса для ПЗУ ROM1, в котором хранятся значения ![]() и
и ![]() , и для экранного ОЗУ. Счетчик СТХ тактируется импульсами RD системы управления через схему И. Если формат изображения на экране равен 512
, и для экранного ОЗУ. Счетчик СТХ тактируется импульсами RD системы управления через схему И. Если формат изображения на экране равен 512![]() 512, то счетчики СТХ и СТY могут быть 9-разрядными.
512, то счетчики СТХ и СТY могут быть 9-разрядными.
Однако в данном случае СТY – 10-разрядный. Десятый разряд Q9 используется для блокировки элемента И после 512-го импульса на входе С. Все счетчики сбрасываются в ноль по сигналу «Кадр», означающего начало формирования кадра.
По адресам Х и Y ПЗУ ROM1 выставляет на выходе два двоичных числа, которые содержат целые и дробные значения ![]() и j. Например, под целую часть r может быть отведено 9 старших разрядов, а под дробную – 4-6 младших разрядов (это зависит от желаемой точности). Так как для интерполяции данных необходимо четыре отсчета в полярной системе координат, то кроме адресов
и j. Например, под целую часть r может быть отведено 9 старших разрядов, а под дробную – 4-6 младших разрядов (это зависит от желаемой точности). Так как для интерполяции данных необходимо четыре отсчета в полярной системе координат, то кроме адресов ![]() и
и ![]() требуются еще адреса r + 1 и j + 1. Они формируются с помощью сумматоров (инкременторов) «+1», которые представляют собой отдельные микросхемы. Дробные части
требуются еще адреса r + 1 и j + 1. Они формируются с помощью сумматоров (инкременторов) «+1», которые представляют собой отдельные микросхемы. Дробные части ![]() и Dj служат адресами для ПЗУ ROM2, по которым на его выходы вызываются коэффициенты интерполяции.
и Dj служат адресами для ПЗУ ROM2, по которым на его выходы вызываются коэффициенты интерполяции.
Не все поле из 512![]() 512 пикселов будет занято секторным изображением. Для гашения изображения в соответствующих местах экрана на четырех выходах ROM1 при определенных сочетаниях адресов
512 пикселов будет занято секторным изображением. Для гашения изображения в соответствующих местах экрана на четырех выходах ROM1 при определенных сочетаниях адресов ![]() и
и ![]() формируются специальные импульсы гашения. Полученные таким образом адреса r, j, r + 1 j + 1 и коэффициенты интерполяции используются для управления блоком интерполяции, который рассмотрим в виде отдельной структурной схемы (рис.4).
формируются специальные импульсы гашения. Полученные таким образом адреса r, j, r + 1 j + 1 и коэффициенты интерполяции используются для управления блоком интерполяции, который рассмотрим в виде отдельной структурной схемы (рис.4).
Этот блок состоит из четырех идентичных каналов, в каждом из которых содержится два ОЗУ RAM1 и RAM2 с одинаковым объемом памяти. Таким образом, общий объем буферной памяти равен 8-кратному объему, необходимому для записи одного кадра.
Такое решение объясняется, во-первых, принятым принципом записи –считывания (в одно ОЗУ идет запись данных АЦП, из другого – считывание в экранное ОЗУ) и, во-вторых, необходимостью одновременного доступа к данным четырех точек полярной системы. Вариант использования только одной пары ОЗУ потребовал бы разделения доступа по времени и применения сверхбыстродействующих микросхем, что, впрочем, вряд ли помогло решить проблему.
Рассмотрим работу одного канала (первого) интерполятора. Он состоит из двух половин, которые работают в инверсных режимах, задаваемых сигналом DIR. В одну из половин записываются данные от АЦП, а из другой данные считываются для интерполяции. Допустим, что действует сигнал DIR, соответствующий прямому ходу (DIR =1). Мультиплексор MS1 при этом включен на пропускание адреса Аr,jRD.
Рисунок 4. Блок интерполятора.
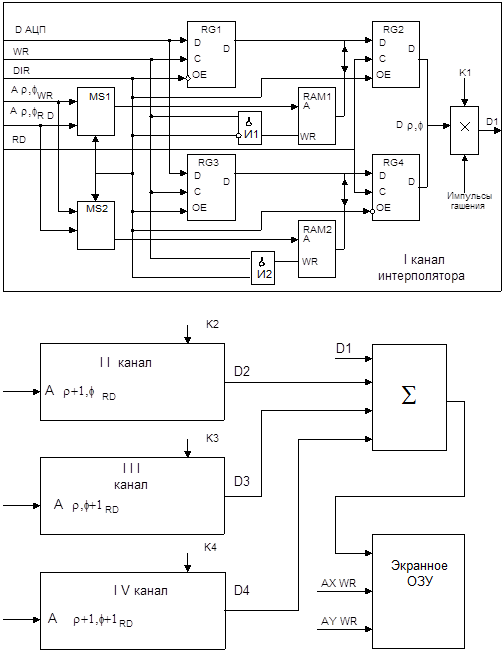 |
Он поступает на адресные входы RAM1. Схема И1 не пропускает сигнал WR и тем самым переводит RAM1 в режим чтения. Регистр RG1 находится в третьем состоянии, а регистр RG2 активизирован и фиксирует данные, считанные из RAM1 по адресам Аr,jRD и передает их на вход перемножителя.
Мультиплексор MS2 включен на пропускание адреса Аr,jWR, который поступает на адресные входы RAM2. Схема И2 разрешает прохождение сигнала WR, управляющего записью в RAM2. Регистр RG3 фиксирует данные АЦП, которые передаются на вход данных RAM2. Регистр RG4 находится в третьем состоянии. При действии сигнала DIR, соответствующего обратному ходу (DIR = 0), функции половин канала интерполятора становятся инверсными.
Работа остальных каналов интерполятора протекает аналогично. Отличия состоят в подаче других адресов чтения, коэффициентов интерполяции и сигналов гашения.
На рис.4 указаны только эти отличия. Результаты преобразования отдельных каналов суммируются, и окончательный результат интерполяции поступает на экранное ОЗУ, куда он записывается по тем же адресам X,YWR, которые использовались для преобразования координат. Таким образом, произошел переход от эхо-изображения в полярной системе координат, которое получается при угловом сканировании, к прямоугольной системе координат, в которой строится изображение на экране монитора. Перейти на страницу: 1 2 3
Советуем почитать:
Синтез и построение системы управления динамическими объектами Информация об объекте управления может быть получена путем измерения соответствующих параметров. Однако не все параметры могут быть непосредственно измерены из-за отсутствия необходимых ...
Микроконтроллеры для начинающих. И не только Микроконтро́ллер (англ. Micro Controller Unit, MCU) – микросхема, предназначенная для управления электронными устройствами. Типичный микроконтроллер сочетает в себе функции пр ...
Система электронного управления магнитно-резонансного томографа МР томограф представляет собой сложную систему, состоящую из большого числа узлов различного назначения и размещенную на большой площади. Сказанное относится в первую очередь к МРТ ...