Первыми датчиками для универсальных УЗ сканеров были секторные механические датчики качающегося типа (термин «качающийся» относится к пьезоэлектрическому преобразователю). Сейчас они постепенно вытесняются электронно-управляемыми датчиками (линейными и конвексными), но по-прежнему применяются и совершенствуются.
Обобщенная структурная схема такого датчика приведена на рис.4.
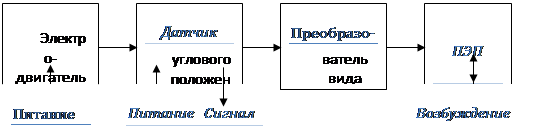 |
Рисунок 4. Структурная схема механического датчика.
Электродвигатель может совершать возвратно-вращательное движение и одностороннее вращение. В зависимости от этого датчик углового положения может иметь различный принцип действия и конструкцию. Преобразователь движения может включать редуктор и преобразователь вида движения (перевод вращения из одной плоскости в другую, перевод вращательного движения в качательное).
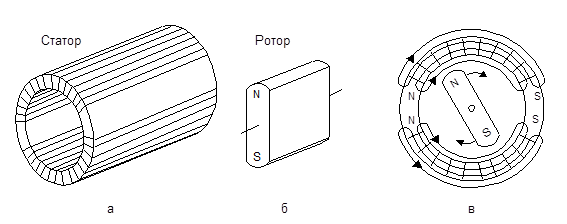 |
Рисунок 5 Моментный двигатель постоянного тока.
Основными частями электродвигателя являются статор и ротор (рис. 5, а, б) Статор собирается из тонких пермаллоевых колец. Обмотка статора состоит из двух секций, которые включаются встречно. Ротор представляет собой постоянный магнит из феррита. При пропускании тока через обмотки статора они создают в сердечнике магнитные потоки, направленные в разные стороны, поэтому основной поток в сердечнике равен нулю. Но ввиду того, что ширина колец мала по сравнению с их диаметром, образуются потоки рассеяния, сцепленные с обмотками. Получаются как бы два магнита с одинаково расположенными одноименными полюсами. Взаимодействуя с полями этих магнитов, ротор поворачивается, стремясь занять положение, параллельное обмоткам. Динамические характеристики механической системы и параметры тока возбуждения (величина, форма, период) согласованы так, что когда ротор повернется на угол 90 – 100о от исходного крайнего положения, происходит коммутация тока в обмотках и начинается его движение в обратную сторону.
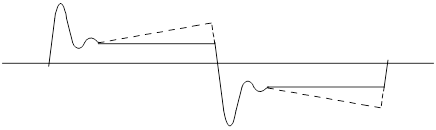
Чтобы движение было равномерным, необходимо постоянство вращающего момента, а для этого в свою очередь требуется постоянство тока в обмотках. В момент коммутации и смены направления вращения возникают броски тока за счет инерционности системы управления (рис 6). В некоторых случаях ток может линейно нарастать (штриховая линия на рисунке). Требуемую форму тока обеспечивает специальная система регулирования с обратной связью через датчик угла поворота. Она учитывает механические и электрические характеристики системы. В режиме М должен быть задан определенный угол поворота пьезопреобразователя. Для этого система регулирования с высокой частотой реверсирует ток в обмотках статора, удерживая тем самым ротор в одном положении.
 |
Кривые линии и поверхности, их применение в радиоэлектронике и автоматике Кривые линии и поверхности их применение в радиоэлектронике и автоматике. Этот раздел курса имеет особое значение для графической подготовки инженера. Внешняя и внутренняя форма дета ...
Источники питания электронных устройств Применение различного рода электронных устройств для управления производственными процессами подразумевает использование электрической энергии определенного вида для их питания (постоян ...
Система автоматического регулирование температуры теплоносителя зерносушилки Техническое задание на проектирование включает в себя исходные данные, позволяющие произвести синтез системы. К ним относятся функциональная схема нескорректированной САУ, сведения о при ...