Броски тока двигателя весьма нежелательны, особенно при пуске датчика. Пусковые токи могут достигать величин, опасных (несколько ампер) для выходного усилителя системы управления, питающего двигатель. При сбое системы управления могут одновременно включиться все механические датчики используемого комплекта (как правило, все они подключены и выбираются с помощью сенсоров). Это может привести к выходу усилителя из строя. На этот случай предусмотрена защита, например, в виде плавкого предохранителя.
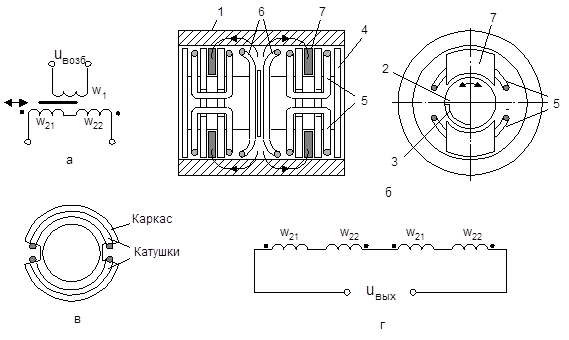 |
Рисунок 7. Датчик углового положения трансформаторного типа.
которые включены встречно. Подвижный сердечник перемещается относительно этих обмоток, при этом ЭДС в них изменяются. В среднем положении сердечника они одинаковы, и выходной сигнал равен нулю. При смещении сердечника влево или вправо ода из ЭДС увеличивается, а другая уменьшается. Выходной сигнал растет по величине и может иметь различную фазу в зависимости от положения сердечника (левое или правое). Так как габариты датчика очень маленькие, первичная обмотка возбуждается высокочастотным током (10 – 15 кГц).
На рис 7, б изображена упрощенная конструкция ДУП. Его основными частями являются статор 1 из мягкой стали, ротор 2 из немагнитной стали (например, 36НХТЮ) с помещенной на нем пластинкой 3 из ферромагнетика, каркас 4 с размещенными на нем парами сигнальных катушек 5 и катушкой возбуждения 6. Сигнальные катушки расположены парами симметрично относительно центра и имеют сложную форму. Для лучшего представления о ней на рис 14, в показан фрагмент каркаса и одна пара катушек. Пары соединяются последовательно, так, чтобы одноименные катушки были включены согласно (рис.7, г). Катушка возбуждения находится между парами сигнальных катушек. При монтаже края ее витков разводят («распушают»). Внутри сигнальных катушек закрепляют ферритовые сердечники 7.
За счет «распушивания» катушки возбуждения значительная часть создаваемого ею магнитного потока ответвляется в статор и попадает в сердечники 7. Перемещение ферромагнитной пластинки 3 вызывает перераспределение магнитных сопротивлений между сердечниками 7 и катушками сигнальных пар, изменение их ЭДС и возникновение сигнала на выходе. Датчик проектируют, а затем регулируют таким образом, чтобы зависимость величины сигнала от угла поворота была линейной.
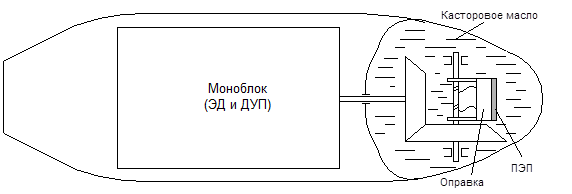 |
Рисунок 8. Передача движения на пьезопреобразователь.
Дисковый пьезопреобразователь находится в оправке, которая закреплена на оси шестеренки. Для подвода импульса возбуждения и съема эхо-сигнала используются гибкие проводники, которые навиваются на ось. Это исключает их болтание во время качания ПЭП и продлевает срок службы. Электродвигатель и датчик углового положения конструктивно объединяются в моноблок, размещаемый в цилиндрическом корпусе из легкого металла. Перейти на страницу: 1 2 3 4
Советуем почитать:
Проект внедрения волоконно-оптической линии связи между УТС Югорскгазтелеком и 5 городскими АТС Последние десятилетия двадцатого века характеризовались бурным ростом спроса на услуги связи и передачи информации. Согласно статистике объем передаваемой в мире информации и оказываемых ...
Разработка технологического процесса сборки измерителя H21э транзисторов При современном конструировании радиоэлектронных аппаратов необходимо в первую очередь учитывать конструктивно-технологические особенности РЭА, включают функционально-узловой принцип ко ...
Синтез и построение системы управления динамическими объектами Информация об объекте управления может быть получена путем измерения соответствующих параметров. Однако не все параметры могут быть непосредственно измерены из-за отсутствия необходимых ...