![]() . (1.41)
. (1.41)
Проверка на нагрев первого двигателя первой траектории
Из рисунка 1.1 видно, что скорость в моменты времени t=2t1 и t=13t1 изменяется скачком. Двигатель не сможет обеспечить такой режим работы, поэтому необходимо предусмотреть участок разгона и участок торможения.
Разобьём время рабочего цикла на 7 интервалов времени:
1. ,
2. ,
3. ,
4. ,
5. ,
6. ,
7.
Режим разгона
Момент, развиваемый двигателем на участке разгона:
![]() .
.
Для первого двигателя первой траектории ![]() .
.
По формуле 1.38 определим ускорение при разгоне:
![]() .
.
Время, необходимое для разгона:
![]() .
.
Режим торможения
На участке торможения двигатель должен развивать тот же максимально возможный момент ![]() .
.
По формуле 1.40 рассчитаем ускорение при торможении:
![]() .
.
Время, необходимое для торможения:
![]() .
.
Графики траектории, скорости и ускорения нагрузки, с учётом введённых участков разгона и торможения, показаны на рис. 1.12.
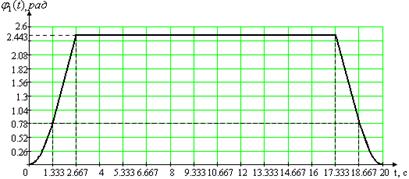
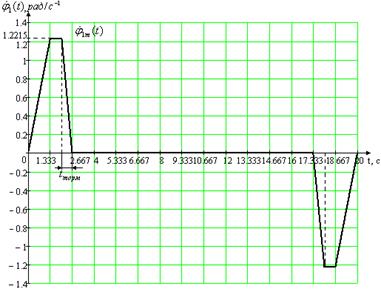
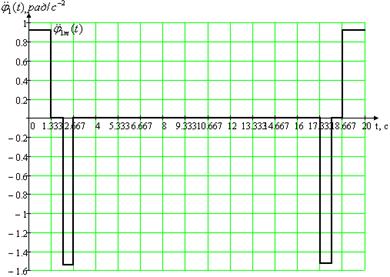
Рис. 1.12. Первая измененная траектория рабочего цикла
Состояние покоя
Момент, требуемый от двигателя на любом из участков траектории, определяется в соответствие с (1.14) и (1.23):
![]() (1.42)
(1.42)
Рассчитывая моменты для любого из участков траектории, рассуждаем следующим образом: составляющие уравнения 1.42, в которые входит ускорение, берем с теми знаками, как показывает диаграмма. Знак статического момента, приведенного к валу двигателя, выбираем так: если сопротивление нагрузки помогает режиму на данном участке (например, режим торможения), тогда знак статического момента берется противоположным знакам слагаемых, в которые входит ![]() . Если сопротивление нагрузки мешает (например, режим разгона), от двигателя требуется момент больший, значит, знак статического момента выбирается такой же, как у слагаемых, в которые входит
. Если сопротивление нагрузки мешает (например, режим разгона), от двигателя требуется момент больший, значит, знак статического момента выбирается такой же, как у слагаемых, в которые входит ![]() .
.
Таблица 1.7
|
| Интервал времени | Формула для расчета | Значение |
| 1 |
|
| 0.28687 |
| 2 |
|
| 0.00063 |
| 3 |
|
| 0.47771 |
| 4 |
|
| 0.00032 |
| 5 |
|
| 0.47771 |
| 6 |
|
| 0.00063 |
| 7 |
|
| 0.28561 |
Управление динамической системой Теория управления – это наука, изучающая процессы в системах управления с информационной точки зрения, обычно абстрагируясь от физической природы объектов и управляющих устройств. Процес ...
Дистанционный комплекс контроля функционального состояния В настоящее время непрерывно расширяется область применения методов регистрации параметров биосигналов в практических и исследовательских задачах. Современный уровень научных достижений ...
Моделирование голограммы, получаемой с помощью подповерхностного сканирующего радиолокатора Современные радиолокаторы можно условно разделить условно на два класса: радиолокаторы в которых используются видеоимпульсные сигналы и радиолокаторы с использованием гармонических модулиро ...