Применение цифровых систем управления электроприводами постоянного тока требует особого подхода к их математическому описанию и моделированию. Это обусловлено наличием квантования непрерывных функций (тока, скорости, положения) по уровню и времени, а также запаздыванием результатов расчетов.
Для анализа и синтеза цифровых систем управления применяют метод дискретных передаточных функций (ДПФ) и метод дискретных частотных характеристик (ДЧХ).
Первый метод дает возможность оптимизировать динамические характеристики во временной области, однако на практике его применение ограничивается системами невысокого порядка.
Метод ДЧХ позволяет осуществлять синтез регулятора в частотной области. Он значительно проще метода ДПФ, однако его применение возможно только при определенных соотношениях между частотой квантования, частотой среза и малыми постоянными времени. Синтезированный по этому метода регулятор не является строго оптимальным; так как фактически метод основан на аналогии дискретных и непрерывных систем при малых значениях периода квантования. Однако если учесть, что система управления приводом строится по структуре подчиненного регулирования, метод ДЧХ является единственным средством математического описания привода.
Модель цифрового электропривода может быть представлена двумя частями – неизменяемой частью (НЧ), которая охватывает все элементы объекта (преобразователь, двигатель, кинематическую схему и др.) и дискретной частью (МП-система), которая реализует корректирующий алгоритм цифрового регулятора.
Структурная схема цифровой системы электропривода представлена на рисунке 3.1.
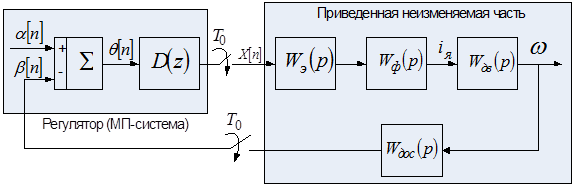
Рисунок 3.1 – Структурная схема системы электропривода
Неизменяемая часть описывается обычно дифференциальными уравнениями, представленными передаточной функцией ![]() , а цифровые регуляторы – уравнениями в разностной форме, представленными передаточной функцией
, а цифровые регуляторы – уравнениями в разностной форме, представленными передаточной функцией ![]() .
.
Единое представление этих частей системы может быть получено с помощью z-преобразования и связанного с ним билинейного w-преобразования.
Задающее воздействие ![]() и сигнал обратной связи
и сигнал обратной связи ![]() представляют собой решетчатые функции. Функция сигнала ошибки
представляют собой решетчатые функции. Функция сигнала ошибки ![]() под действием корректирующего алгоритма цифрового регулятора, описываемого дискретной передаточной функцией (ДПФ)
под действием корректирующего алгоритма цифрового регулятора, описываемого дискретной передаточной функцией (ДПФ) ![]() , превращается в решетчатую функцию управления
, превращается в решетчатую функцию управления ![]() . Соединение дискретной части с неизменяемой частью обеспечиваются фиксатором.
. Соединение дискретной части с неизменяемой частью обеспечиваются фиксатором.
Выходной сигнал фиксатора, например, регистра или цифро-аналогового преобразователя, должен быть экстраполированным, то есть преобразованным в непрерывную форму. Обычно сигнал экстраполируется функцией нулевого порядка ![]() .
.
Объединив экстраполятор с неизменяемой частью, получим приведенную неизменяемую часть с передаточной функцией:
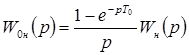 . (3.1)
. (3.1)
Дискретная передаточная функция неизменяемой части представляется Z-преобразованием:
![]() (3.2)
(3.2)
где ![]() – z-преобразование передаточной функции приведенной неизменяемой части;
– z-преобразование передаточной функции приведенной неизменяемой части; ![]() .
.
Неизменяемая часть включает в себя экстраполятор, формирователь тока якоря, двигатель постоянного тока и датчик обратной связи, которые описываются передаточными функциями – ![]() ,
, ![]() ,
, ![]()
![]() , соответственно.
, соответственно.
Передаточная функция формирователя тока описывает соединение двух звеньев, включенных последовательно и образующих единую систему – преобразователь (ТП или ШИП) и якорную цепь двигателя. В результате такого объединения исключается математическое описание преобразователя, который имеет сложную форму выходного напряжения, и математический анализ производится относительно импульсов тока якоря, форма которых проще. При этом передаточная функция формирователя тока приобретает следующий вид:
 , (3.3)
, (3.3)
где ![]() – коэффициент передачи по току;
– коэффициент передачи по току;
![]() – относительная длительность импульса напряжения (
– относительная длительность импульса напряжения (![]() <1); Перейти на страницу: 1 2 3
<1); Перейти на страницу: 1 2 3
Разработка делителя мощности на микрополосковой линии В настоящее время область применения радиоэлектронных средств расширяется, комплексы радиосистем становятся все более сложными, это полностью относится и к радиотехнике СВЧ диапазона. В ...
Структурные схемы цифровых радиопередающих устройств Радиопередающие устройства (РПдУ) применяются в сферах телекоммуникации, телевизионного и радиовещания, радиолокации, радионавигации. Стремительное развитие микроэлектроники, аналогов ...
Импульсный лабораторный источник питания Для проведения лабораторных работ, исследований и испытаний приборов необходим источник питания. Требования к источникам вторичного питания, предъявляются очень высокие. Особенно к таким ...