![]() – целое число периодов дискретности
– целое число периодов дискретности ![]() , на которое запаздывает импульс напряжения относительно времени подачи управляющего сигнала, принимаем l=1 (для ШИП);
, на которое запаздывает импульс напряжения относительно времени подачи управляющего сигнала, принимаем l=1 (для ШИП);
![]() – дробная часть периода дискретности
– дробная часть периода дискретности ![]() (0<
(0<![]() <1), характеризующая величину запаздывания импульса напряжения;
<1), характеризующая величину запаздывания импульса напряжения;
![]() – функция запаздывания;
– функция запаздывания;
 – функция длительности импульса напряжения.
– функция длительности импульса напряжения.
![]() – постоянная времени якорной цепи двигателя.
– постоянная времени якорной цепи двигателя.
Постоянная времени цепи якоря ![]() , определяется по формуле:
, определяется по формуле:
 , (3.4)
, (3.4)
где ![]() – суммарные значения индуктивностей и сопротивлений обмотки якоря электродвигателя, трансформатора, уравнительных реакторов и дросселя, соединительных проводов и силовой цепи преобразователя.
– суммарные значения индуктивностей и сопротивлений обмотки якоря электродвигателя, трансформатора, уравнительных реакторов и дросселя, соединительных проводов и силовой цепи преобразователя.
Учитывая, что передаточная функция якорной цепи введена в передаточную функцию формирователя тока, в структуре двигателя (рисунок 3.2) остается лишь звено, описывающее электромеханическую часть двигателя:
 . где
. где ![]() . (3.5)
. (3.5)
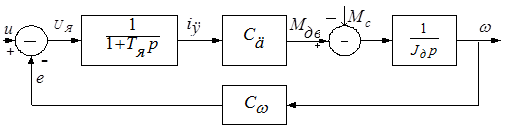
Рисунок 3.2 – Структурная схема двигателя постоянного тока
В качестве датчиков скорости применяются устройства, инерционность которых неизмеримо мала по сравнению с периодом дискретности. Поэтому они могут быть представлены пропорциональным звеном с передаточной функцией:
![]() . (3.6)
. (3.6)
С учетом изложенного передаточная функция приведенной неизменяемой части приобретает вид:
![]() (3.7)
(3.7)
 (3.8)
(3.8)
Произведя преобразования, получим:
 , (3.9)
, (3.9)
где  – коэффициент передачи неизменяемой части.
– коэффициент передачи неизменяемой части.

Коэффициент ![]() может быть принят равным единице, так как обычно диапазоны управляющих воздействий и сигналов обратной связи одинаковы, (разрядность кода управления
может быть принят равным единице, так как обычно диапазоны управляющих воздействий и сигналов обратной связи одинаковы, (разрядность кода управления ![]() равна разрядности кода обратной связи
равна разрядности кода обратной связи ![]() ).
).
Для выполнения синтеза цифрового регулятора неизменяемая часть должна быть представлена дискретными функциями.
Определим дискретную передаточную функцию (ДПФ) приведенной неизменяемой части:
![]() . (3.10)
. (3.10)
При этом следует иметь в виду, что в описании неизменяемой части имеются элементы запаздывания вида ![]() , для которых следует применять модифицированное
, для которых следует применять модифицированное ![]() -преобразование.
-преобразование.
Тогда выражение (3.10) принимает вид:
 .(3.11)
.(3.11)
В этом выражении ![]() – оператор
– оператор ![]() -преобразования без запаздывания, а
-преобразования без запаздывания, а ![]() – оператор модифицированного
– оператор модифицированного ![]() -преобразования (с запаздыванием).
-преобразования (с запаздыванием).
3. Выполнив ![]() -преобразования получим выражение
-преобразования получим выражение
 . (3.12)
. (3.12)
Где
 – коэффициент передачи неизменяемой части;
– коэффициент передачи неизменяемой части;
![]() ;
;
![]() ;
;
![]() .
.
Коэффициент ![]() может быть принят равным единице, так как обычно диапазоны управляющих воздействий и сигналов обратной связи одинаковы, (разрядность кода управления
может быть принят равным единице, так как обычно диапазоны управляющих воздействий и сигналов обратной связи одинаковы, (разрядность кода управления ![]() равна разрядности кода обратной связи
равна разрядности кода обратной связи ![]() ). Перейти на страницу: 1 2 3
). Перейти на страницу: 1 2 3
Измеритель напряжённости и градиента магнитного поля Написание дипломного проекта и последующая его защита является заключительной стадией обучения в средних специальных учебных заведениях. Дипломный проект является обобщающей проверкой вс ...
Имитационное моделирование системы фазовой автоподстройки частоты в пакете моделирования динамических систем Simulink Цель работы: Изучить методы имитационного моделирования системы автоматического регулирования и исследования основных характеристик систем фазовой автоподстройки частоты (ФАП). Домашн ...
Проектирование трансформатора общего назначения За, последние годы широкое применение получила радиоэлектронная техника, характер и функции которой требуют применения десятков и сотен тысяч различных комплектующих изделий, среди котор ...